5-160
5-12 Simple Position Control Function
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
5
Functions
Simple Position Control Mode
When Pulse Train Input Terminal RP Selection (P003) is set to "01: Feedback pulse," the pulse
train signals are used as feedback information from the encoder. (Enabled for Control 1 only)
The position reference is specified by the combination of multi-function input terminals. Up to
eight position references can be specified.
The speed for a position command conforms to the Output Frequency Setting (F001). For data
with many digits, such as position commands, only the higher four digits are displayed. A run
command (FW or RV) is required separately as well as the position command. (Set A002 to
01.) This is needed to enable DC injection braking when stopping. During Digital Operator
operation (A002 = 2), DC injection braking does not function. DC injection braking functions
when A002 is 03 and A002 is 04.) For information on DC injection braking (DB), refer to
"Brake
Settings" on page 5-135
. (DC Injection Braking Power (A054) must be set. Set A051 to 00. Even
with these settings, DC injection braking will function for simple position control when external
DC injection braking is selected. For position control, external DC injection braking takes
priority, so do not set A051 to 01 or 02.)
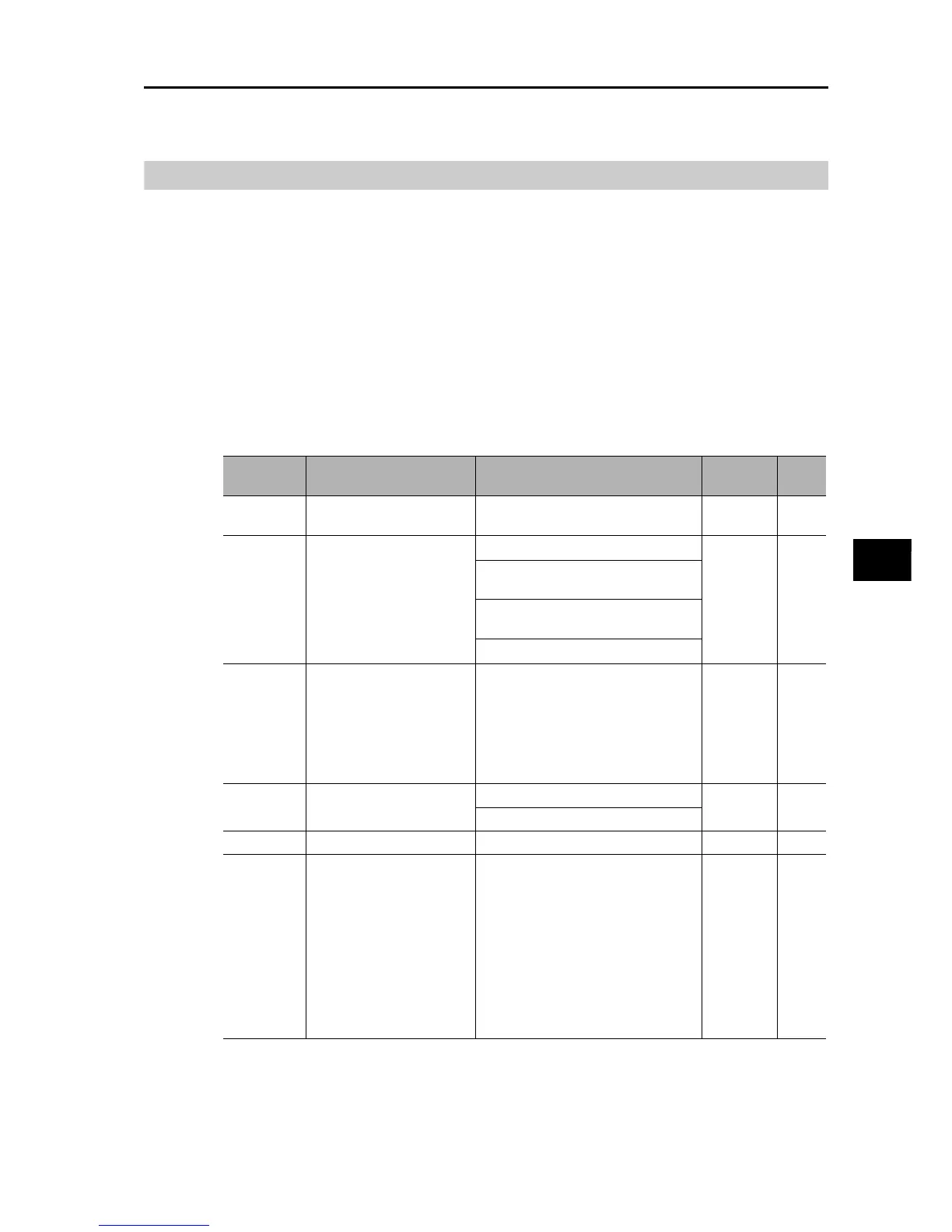
Parameter
No.
Function name Data
Default
setting
Unit
P003
Pulse Train Input Terminal
RP Selection
01: Feedback pulse
00 −
P004
Feedback Pulse Train Input
Type Selection
00: 1-phase pulse train
*2
00 −
01: Dual-phase pulse train with 90
°
phase difference 1
*1 , *2
02: Dual-phase pulse train with 90
°
phase difference 2
*1, *2
03: 1-phase pulse train + direction
*1, *2
P011 Number of Encoder Pulses
32. to 1024.
Set the calculated number of pulses
per motor rotation for each
connected encoder phase. This
setting is used for speed detection
and position control by calculating
pulse to stop.
512.
Pulse
P012
Simple Position Control
Selection
00: Simple position control disabled
00 −
02: Simple position control enabled
P015 Creep Speed Setting Starting frequency to 10.00 (100.0) 5.00 Hz
P026
Overspeed Error Detection
Level
0.0 to 150.0
The Inverter will be tripped if the
motor speed detected by the encoder
exceeds the maximum frequency
times the Overspeed Error Detection
Level (P026) during operation when
P003 is set to 01 (encoder feedback)
and P026 is not set to 0.
This does not depend on whether
simple position control of V/f control
with FB is ON or OFF.
115.0 %