9 - 11
9 Encoder Input Slave Unit
GX-series EtherCAT Slave Unit User’s Manual
9-3 Function of the Encoder Input Slave Units
9
9-3-4 Encoder Direction Setting
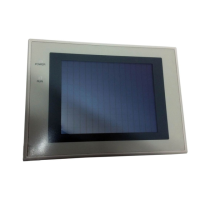
When incremental/decremental pulses are input, the connection with external input devices
becomes as follows.
• If the input method is changed while the counter is stopped or operating, restart (stop →
operate) the counter in order to reflect the change to the count operation.
• If the set value is read without restarting, the set value after change can be read, but the actual
count operation is performed with the set value before change.
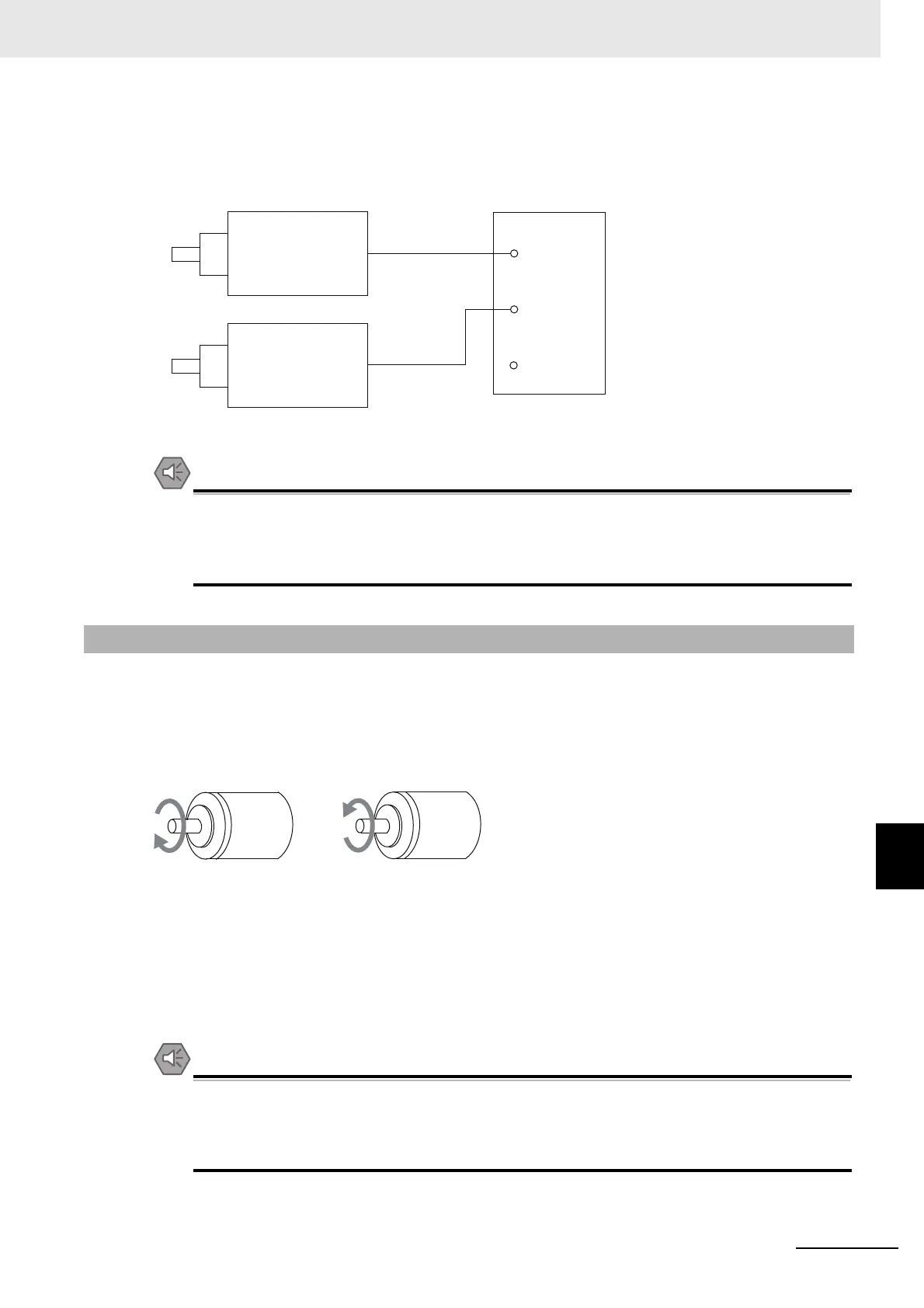
There are two following types for the encoder directions of an Encoder Input Slave Unit.
• Forward direction at CW (clockwise rotation seen from the shaft of the connected encoder)
• Forward direction at CCW (counterclockwise rotation seen from the shaft of the connected encoder)
Note that SDO communications are used to set encoder direction. (Default setting: Forward direction at
CW)
The target index is 4001 hex.
For the set values, refer to the information in the corresponding index of "Appendix A-1 Object
Dictionary" in Page A - 49.
• If you change the encoder direction setting when the counter is stopped or operating, restart
the counter to enable using the new encoder direction setting in counter operation.
• If the set value is read without restarting, the set value after change can be read, but the actual
count operation is performed with the set value before change.
9-3-4 Encoder Direction Setting
Encoder or other
pulse generators
Incremental
pulse
Input A
Input B
Input Z
Encoder Input Slave Unit
Encoder or other
pulse generators
Decremental
pulse

 Loading...
Loading...