3-6
3-1 Servo Drive Specifications
3
Specifications
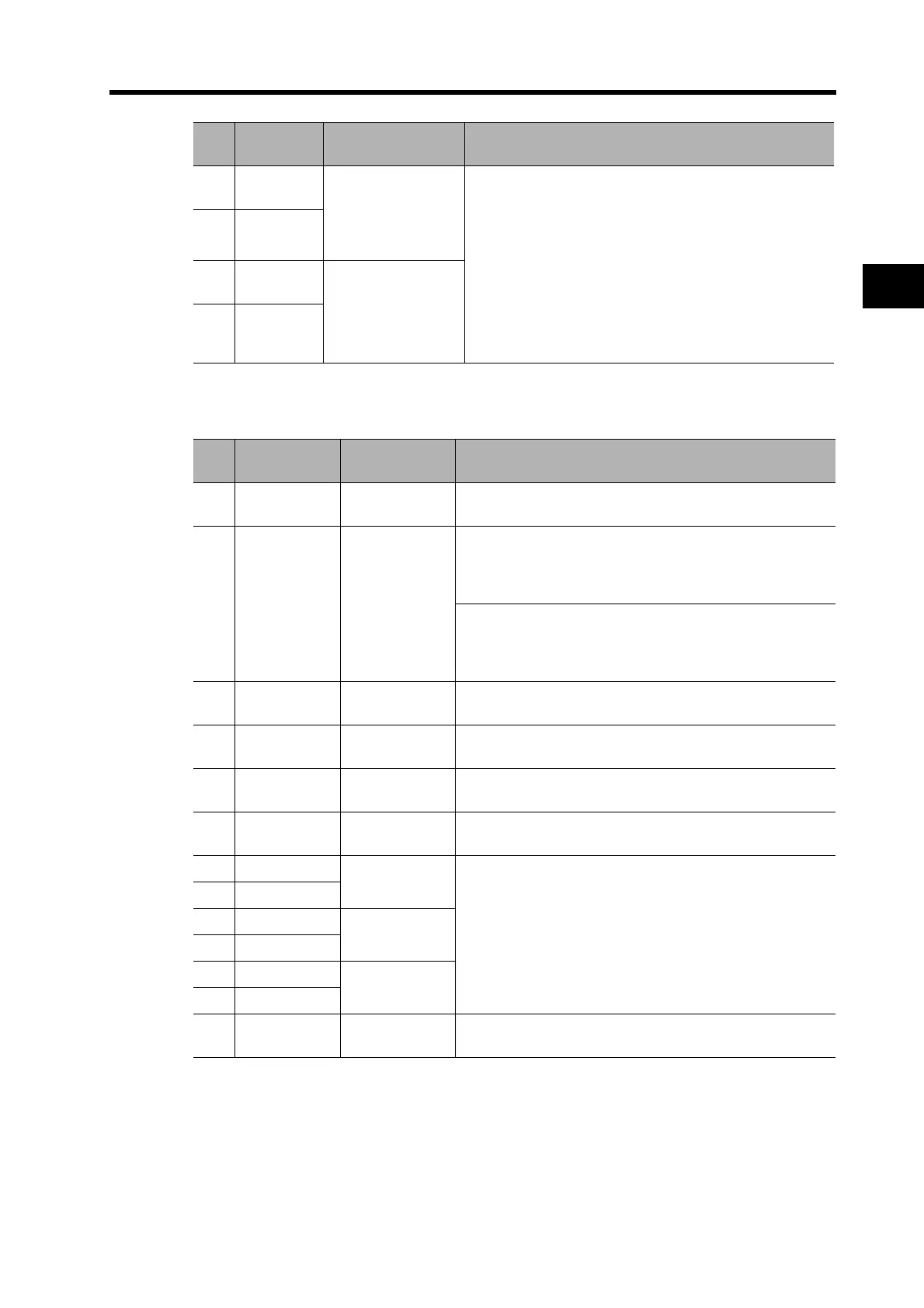
Control Outputs (CN1)
Note An open-collector output interface is used for sequence outputs (maximum operating
voltage: 30 VDC; maximum output current: 50 mA).
Pin
No.
Signal
name
Name Function/Interface
22
+CW/
PULS/FA
Reverse Pulses
Input, Feed Pulses
Input, or 90° Phase
Difference Pulses
(Phase A)
Input terminals for position command pulses.
Line-driver input:
Maximum response frequency: 500 kpps
Open-collector input:
Maximum response frequency: 200 kpps
Any of the following can be selected by using the Pn42
setting: forward and reverse pulses (CW/CCW); feed
pulse and direction signal (PULS/SIGN); 90° phase differ-
ence (phase A/B) signals (FA/FB).
23
−CW/
PULS/FA
24
+CCW/
SIGN/FB
Forward Pulses,
Direction Signal, or
90° Phase
Difference Pulses
(Phase B)
25
−CCW/
SIGN/FB
Pin
No.
Signal name Name Function/Interface
9/ALM
Alarm Output When the Servo Drive generates an alarm, the output turns
OFF.
*1
*1. This is OFF for approximately 2 seconds after turning ON the power.
10 INP/TGON
Positioning
Completed
Output or
Servomotor
Rotation Speed
Detection
Output
Positioning completed output in Position Control Mode
(when Pn02 is set to 0 or 2).
ON: The residual pulses for the deviation counter are within
the setting for Positioning Completion Range (Pn60).
Motor rotation detection output in Internal Speed Control
Mode (when Pn02 is set to 1).
ON: The number of Servomotor rotations exceeds the value
set for Servomotor Rotation Detection Speed (Pn62).
11 BKIR
Brake Interlock
Output
Outputs the holding brake timing signals. Release the hold-
ing brake when this signal is ON.
12 WARN Warning Output
The signal selected in the Warning Output Selection (Pn09)
is output.
13 OGND
Output Ground
Common
Ground common for sequence outputs (pins 9, 10, 11, and
12).
14 GND
Ground
Common
Common for Encoder output and phase-Z output (pin 21).
15 +A
Encoder
Phase-A Output
These signals output encoder pulses according to the
Encoder Dividing Ratio Setting (Pn44).
This is the line-driver output (equivalent to RS-422).
16 −A
17 −B Encoder
Phase-B Output
18 +B
19 +Z Encoder
Phase-Z Output
20 −Z
21 Z Phase-Z Output
Outputs the phase Z for the Encoder (1 pulse/rotation).
This is the open-collector output.