5-13
5-7 Gain Switching
5
Operating Functions
5-7 Gain Switching
In Position Control Mode, you can switch between PI (proportional and integral) operation and P
(proportional) operation, or between gain 1 and gain 2.
With PI/P operation switching, the repulsion to external forces applied to the load can be
weakened by eliminating the integral of the speed deviation (i.e., the difference between the speed
command and speed feedback).
Gain 1/gain 2 switching is effective in the following cases:
Reducing the gain to suppress vibration caused by changes in load inertia during operation.
Reducing the gain to suppress vibration due to an increase in speed.
Increasing responsiveness by increasing the gain during operation.
Increasing servo lock rigidity by increasing the gain when stopping.
Reducing the gain to suppress vibration when stopping.
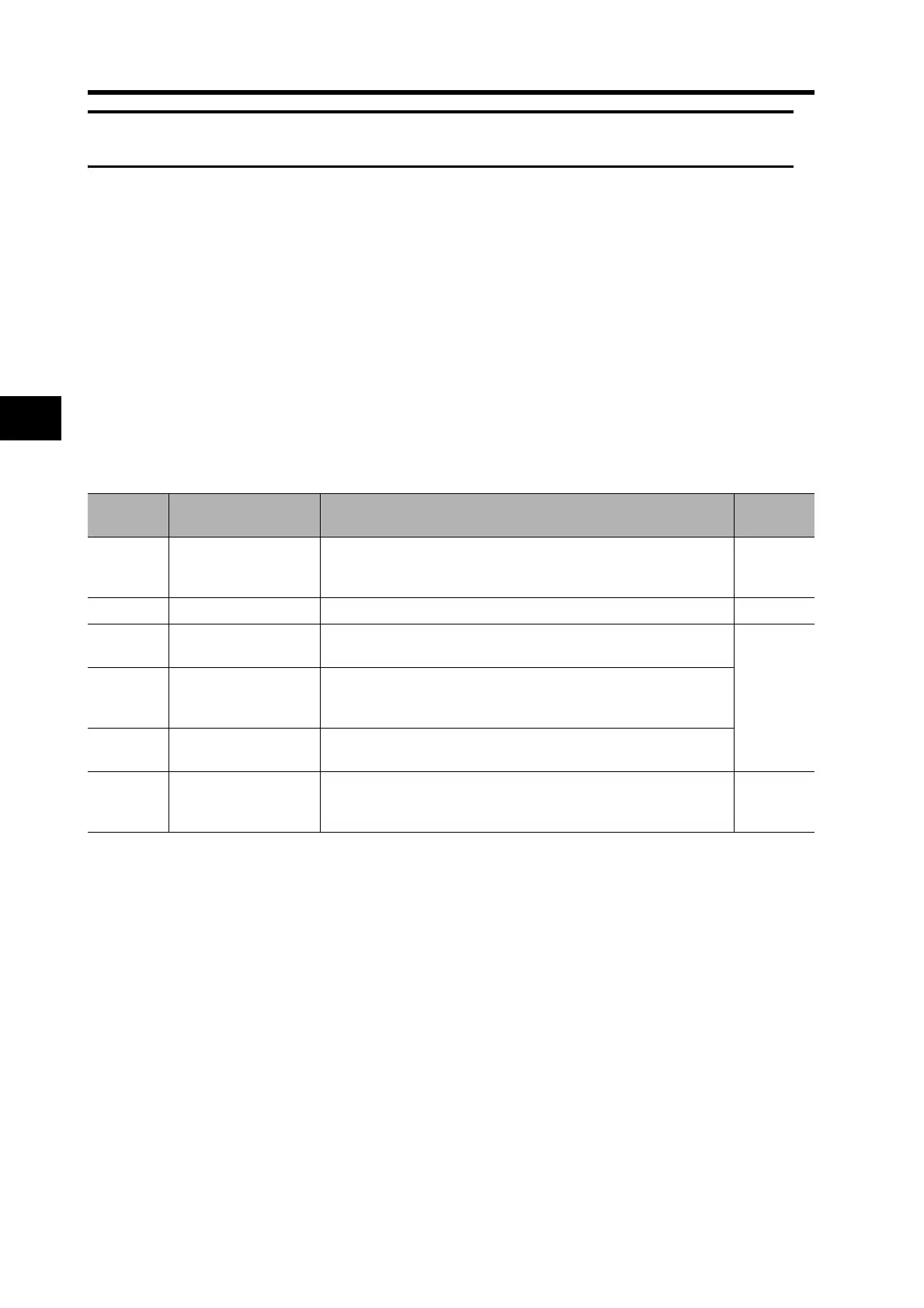
Parameters Requiring Setting
*1. These settings are disabled when the Gain Switch Setting (Pn31) is set to always use gain1 or gain 2 or set to the
Gain Switching Input (CN1-5).
Parameter
No.
Parameter name Explanation Reference
Pn30
Gain Switching Input
Operating Mode
Selection
Select whether to use PI/P operation switching or gain 1/gain 2
switching in Position Control Mode.
Page 5-44
Pn31 Gain Switch Setting Select the condition for switching between gain 1 and gain 2. Page 5-44
Pn32 Gain Switch Time
*1
Set the delay time from the moment the condition set in the Gain
Switch Setting (Pn31) is not met until returning to gain 1.
Page 5-46Pn33
Gain Switch Level
Setting
*1
Set the judgment level for switching between gain 1 and gain 2.
The unit for the setting depends on the condition set in the Gain
Switch Setting (Pn31).
Pn34
Gain Switch
Hysteresis Setting
Set the hysteresis width above and below the judgment level set
in the Gain Switch Level Setting (Pn33).
Pn35
Position Loop Gain
Switching Time
When switching between gain 1 and gain 2 is enabled, set the
phased switching time only for the position loop gain at gain
switching.
Page 5-47