Move robot to pose [HOLD]: moves the robot to the pose set in the Target TCP pose field, if
the button is pressed. Once it is released the robot stops.
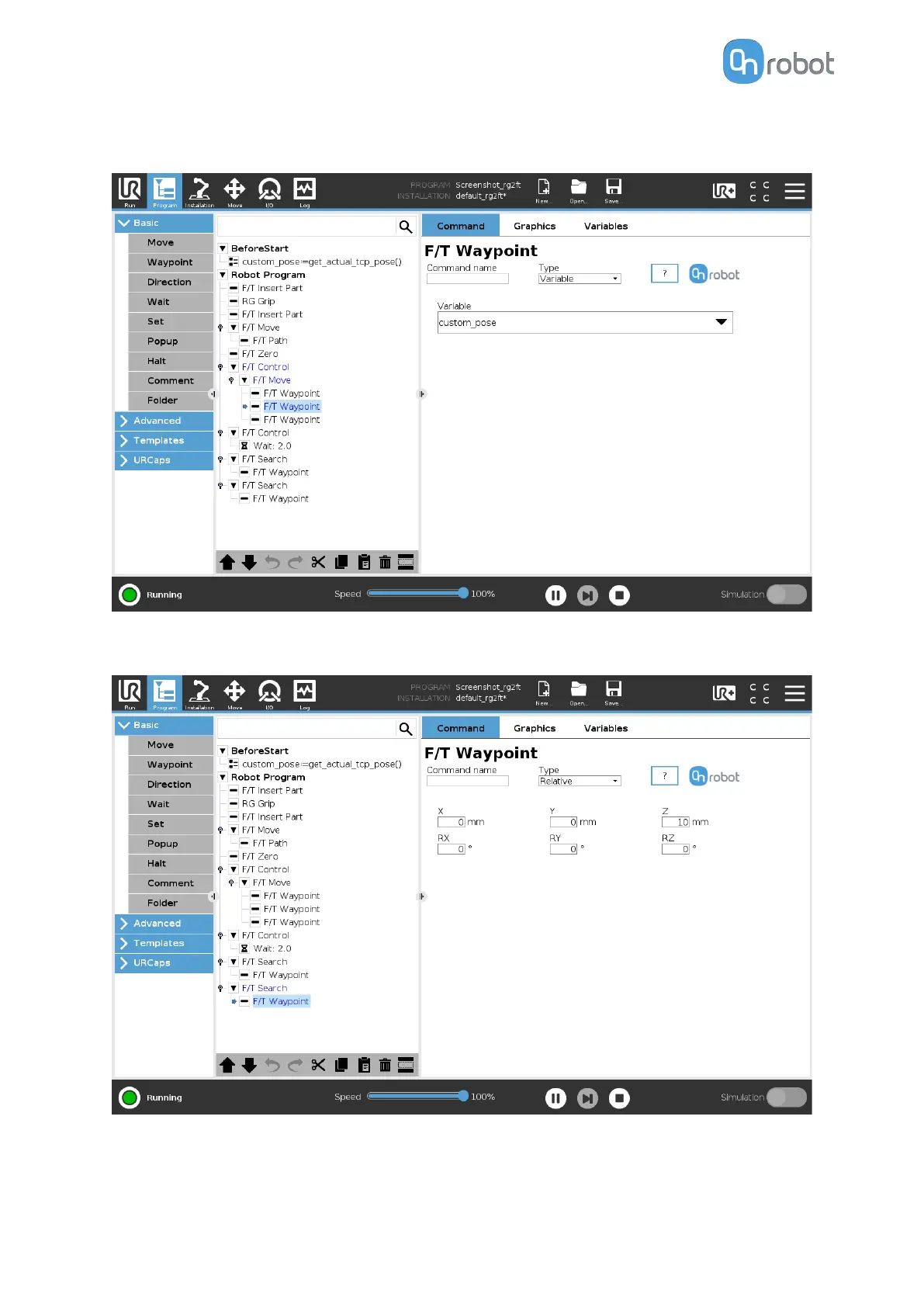
Variable: The position represented by the waypoint in the robot route. A variable can define
the target pose. The variable needs to be created first.
Relative X, Y, Z, RX, RY, RZ: the distances and rotations this waypoint represents, compared
to the previous robot position.
This command has no return value.
OPERATION
96