Parker Hannifin S.p.A. - S.B.C. Division HPD N User’s Manual
25
4. PARAMETERS AND PROGRAMMING
The features: torque, speed, acceleration and position control are the task of a dedicated
electronic circuits. In this chapter you can see how to set up and the meaning of any
parameter, functional block diagrams and advanced functions description too.
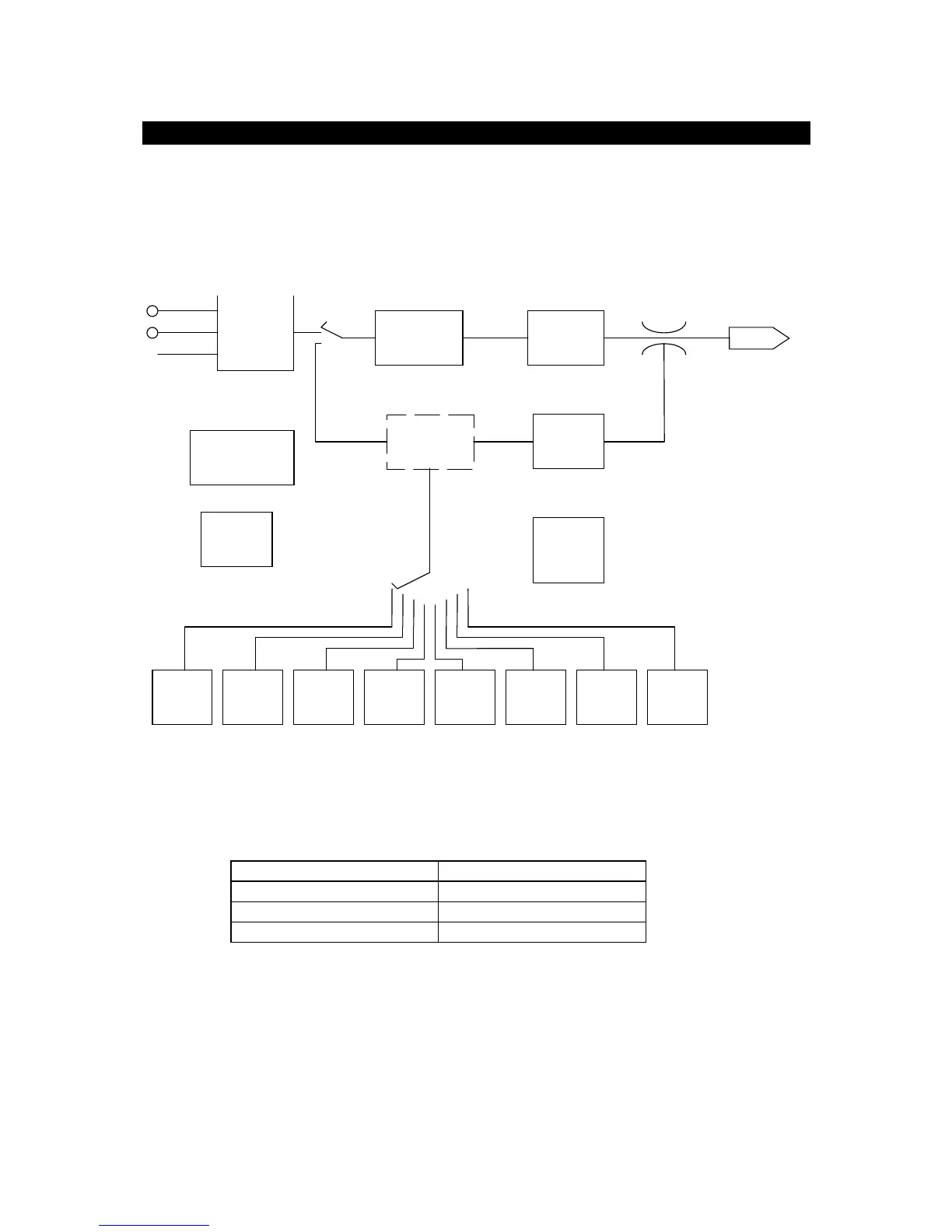
In the figure below it is described the general block diagram of the drive’s functions that you
can configure by parameters.
See chapter
Block diagrams for a better description of how to use the drive, especially for
operating modes. See chapter
Pico-PLC to understand how to connect peripheral systems
(inputs/outputs) to the parametric system of the HPD drive.
Parameters are divided as follows:
REFERENCE
MANAGER
LIMIT SWITCH
&
STOP
SPEED
REGULATOR
OPERATING
MODE
TORQUE
LIMIT
MANAGER
TORQUE DEMAND
analogue
digital
internal
MISCELLANEOUS
SPEED
WINDOWS
TORQUE
MODE
ACCEL.
MODE
MAINT.
MODE
POSITIO.
MODE
DIGITAL
LOCK
MODE
STEPPER
MODE
SPINDLE
ORIENT.
MODE
EXTERN.
MODE
TRIPS
MANAGER
b40.2
Pr31
from Pr0 to Pb42 basic parameters
from Pr50 to Pb70 operating mode parameters
from Pr71 to Pb99 pico-PLC parameters
from In0 to In63 pico-PLC instructions