Parker Hannifin S.p.A. - S.B.C. Division HPD N User’s Manual
63
4.8.2. Examples and applications
The following examples illustrate possible functionalities obtained by suitable
programming of the HPD pico-PLC. The suggested solutions offer the possibility of reducing
the components required to build the machine or part of the machine while, in many cases,
also cutting the overall cost of the application. Note that the pico-PLC scanning time is 6.144
msec and the maximum number of instructions is 64; moreover, the PLC is designed
principally to manage the drive’s digital inputs and outputs.
In addition to a concise description of the application, the examples show the settings
required for HPD parameters and the pico-PLC program. The program is shown in ladder
diagrams and instruction listings.
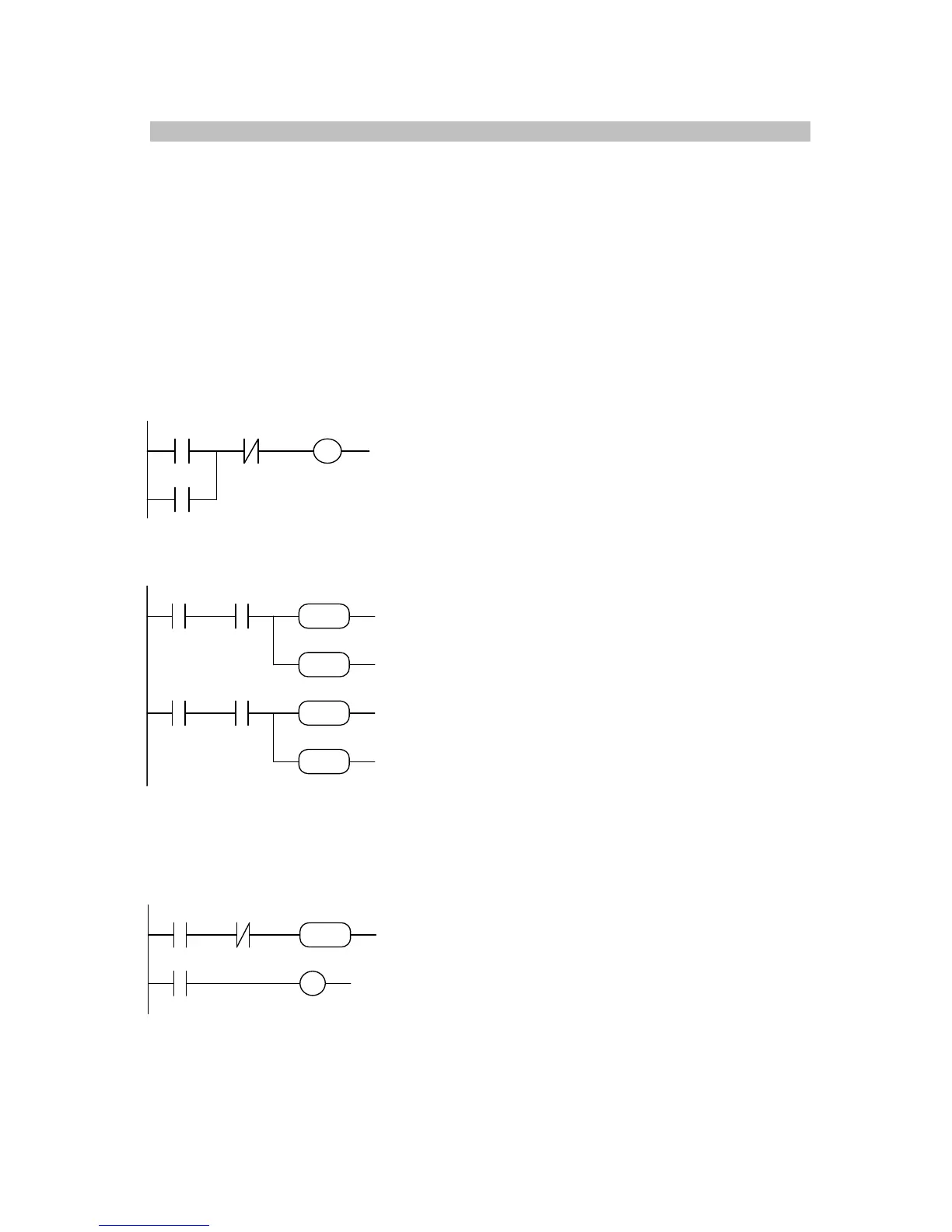
Example 1: two inputs for on/off functions
Example 2: changing a parameter value with the up/down keys
Example 3: command on positive front of a digital input
90.1 90.2 91.2
91.2
digital input 1 sets bit b91.2 to on
digital input 2 sets bit b91.2 to off
LD 90.1
OR 91.2
ANDN 90.2
OUT 91.2
LD 09.1
AND 99.0
ADD 05.73.05
ADD 92.76.92
LD 90.2
AND 99.0
ADD 05.71.05
DD 92.76.92
digital input 1 in high status increases
parameter Pr5 by one unit every 614
msec
digital input 2 in high status decreases
parameter Pr5 by one unit every 614
msec
ADD
ADD
92 76 92
05 73 0590.1 99.0
ADD
ADD
92 76 92
05 71 0590.2 99.0
LD 90.1
ANDN 90.10
SET 70.8
LD 90.1
OUT 90.10
digital input 1 sets bit b70.8 just once
when the signal changes from low to
hi