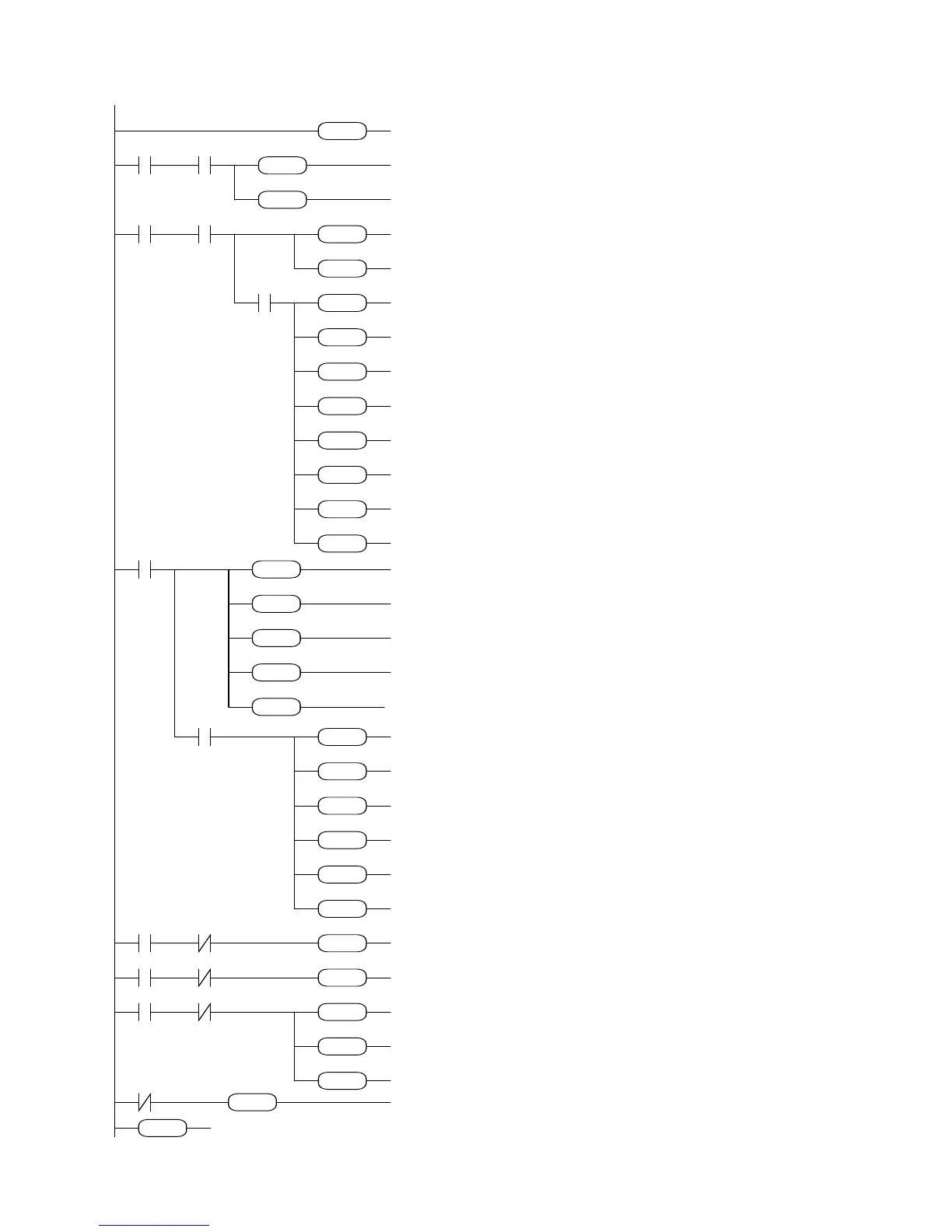
if the axis is locked
fast input disabled
and output enabled (cycle in progress)
if homing has been carried out the bit is
enabled.
Force double word operation (comparison)
comparison for release test
release test Pr86<Pr62
copy master speed into internal speed
reference and enable it
release axis
force double word operation
Pr84 = remaining space
force double word operation
Pr83 = time to reach zero rpm
ramp stopped flag
ramp down management?
Force double word operation
Pr84 = remaining space
force double word operation
calculate ramp speed
and write in internal reference
if speed is zero..........
reset position reference (modulus close)
force double word operation
subtract modulus from motor dimension
deactivate ramp in progress flag
deactivate cycle in progress output
enable fast output
test if reference must be Pr6
test whether to execute homing
execute homing
zero proximity sensor input
honing end test…
position reset
homing flag
enable fast input
if homing not executed
disable fast input
program end