SAMWONTECH
1st Edition of TEMP880S IM : Sep. 21. 2005 Page 55 / 101
▶ One of methods to control during disturbance.
▶ Doesn’t operate when PID Setting Point is I=0.
▶ Control Output(MV) at PID control
▶ MV = P(Proportional value) + I(Integral value) + D(Differential value)
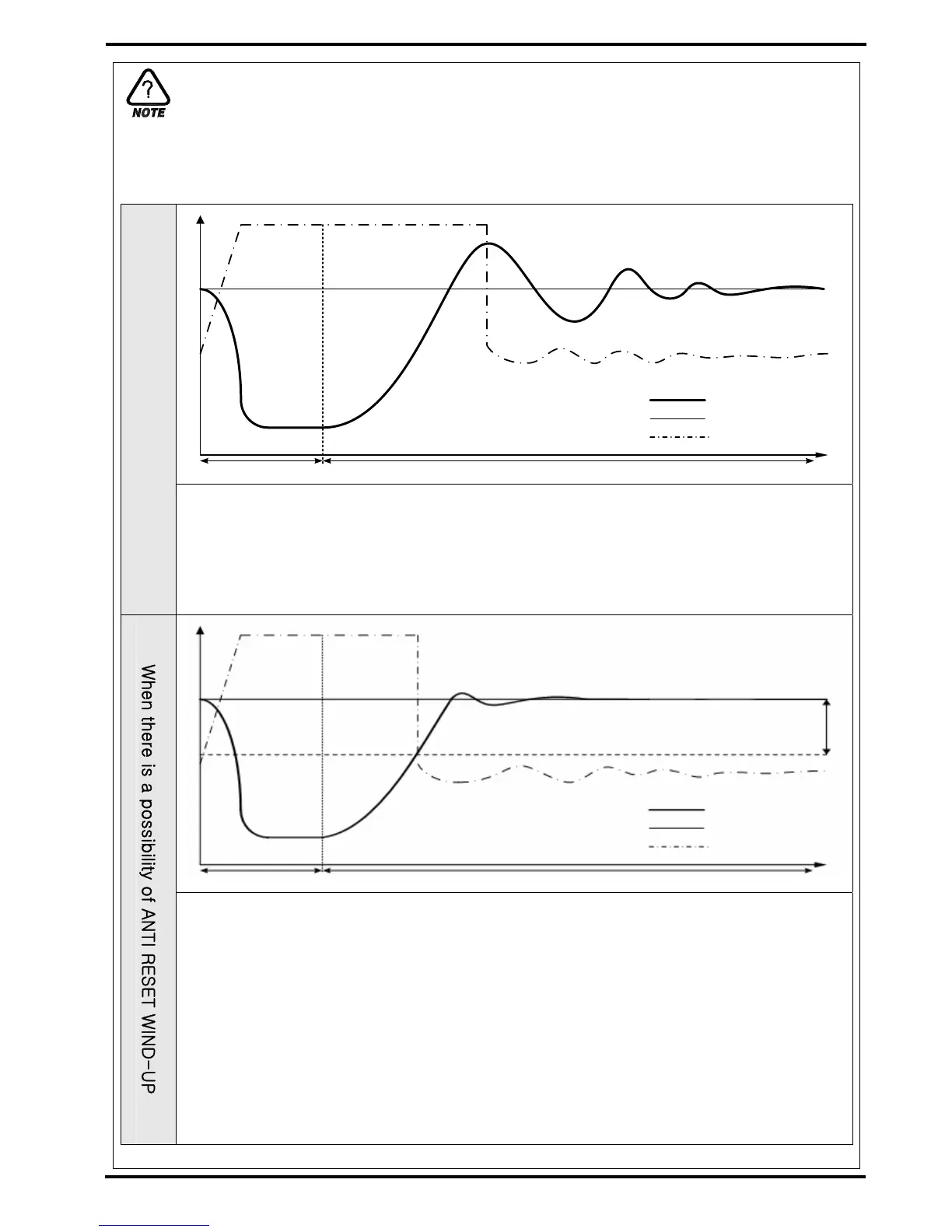
When there is no possibility of ANTI RESET
WIND-UP
When disturbance occurs, Control Output(MV) rises to fit with setting point(SP) and pointing
value(PV) drops.
If such disturbance sustains for a long time, it takes long time for disturbance to be cancelled
due to accumulation of intgral value. Overshoot is large as diagram above and it takes time for
pointing value (PV) to be stablized.
W
h
e
n
t
h
e
r
e
i
s
a
p
o
s
s
i
b
i
l
i
t
y
o
f
A
N
T
I
R
E
S
E
T
W
I
N
D
-
U
P
From the point where pointing value (PV) enters into P BAND, overshoot is small and PV is
stablized fast because accumulation of the integral value is solved.
▶ Example of how to set P BAND
→ Sensor Input:0.0~100.0
℃ , Current Operation PID No. : 1 , P of PID1 group:10.0% ,
→ ARW : 200%
→ P BAND = 200% of P
→ ARW계산 = 20.0%(P*2)
→ ARW계값 = 20.0
℃(total input*0.2)
☞ MV starts changing from|PV-SP|= P BAND point
Ex) Setting Point(SP):
Control Output(MV) starts changing from PV:50.0℃ if PV is 70.0℃.
→ Since |PV-SP|= P BAND, |50.0 -70.0|=20.0
ANTI RESET WIND-UP
SP
PV
MV
SP
PV
MV
P BAND
DisturbanceOccu
Disturbance Cancellation
DisturbanceOccu
Disturbance Cancellation