PY Manual Copyright © 2006 SANYO DENKI AMERICA, Inc.
83
Detailed Description of Parameters
Following is a detailed description of the amplifier parameters arranged by mode number.
Position Loop Gain Kp
Remote Operator Mode:
0
Page:
0
Default Value:
45 (30) rad/s
Function:
Tune
Setting Range:
1 to 1000 rad/s
Description:
•
Proportional gain of the position controller
Feed Forward Gain Kff
Remote Operator Mode:
0
Page:
1
Default Value:
0 %
Function:
Tune
Setting Range:
0 to 100%
Description:
• When set to 100%, the following error becomes “0” when a constant speed is commanded.
•
Higher values of Kff reduce the following error of the position loop. However, too high of a value may
cause the system to become unstable and vibrate.
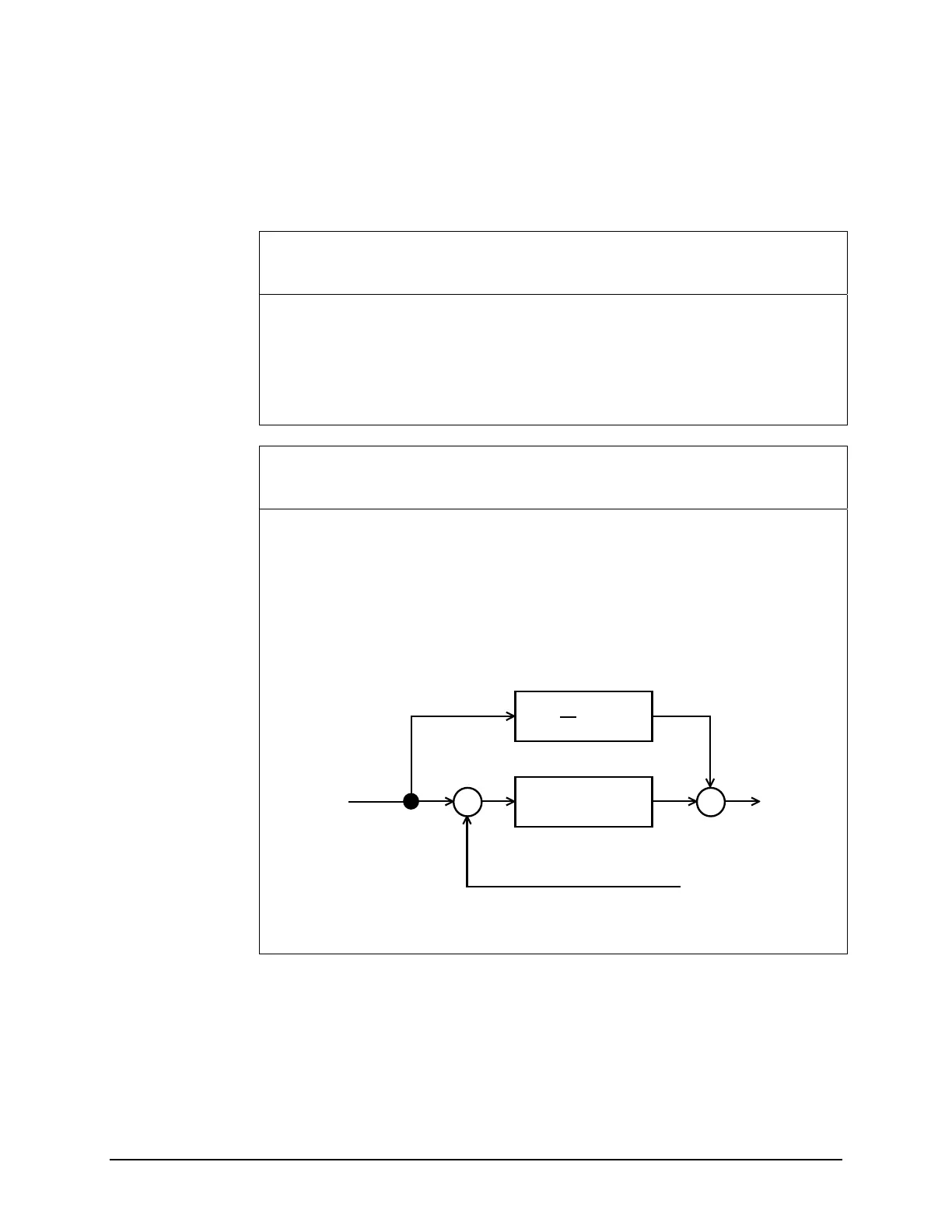
Position Loop
Gain KP
dt
xK
ff
d
i
Position
Command
-
θ
i
Position
Feedback
Velocity
Command
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
 Loading...
Loading...