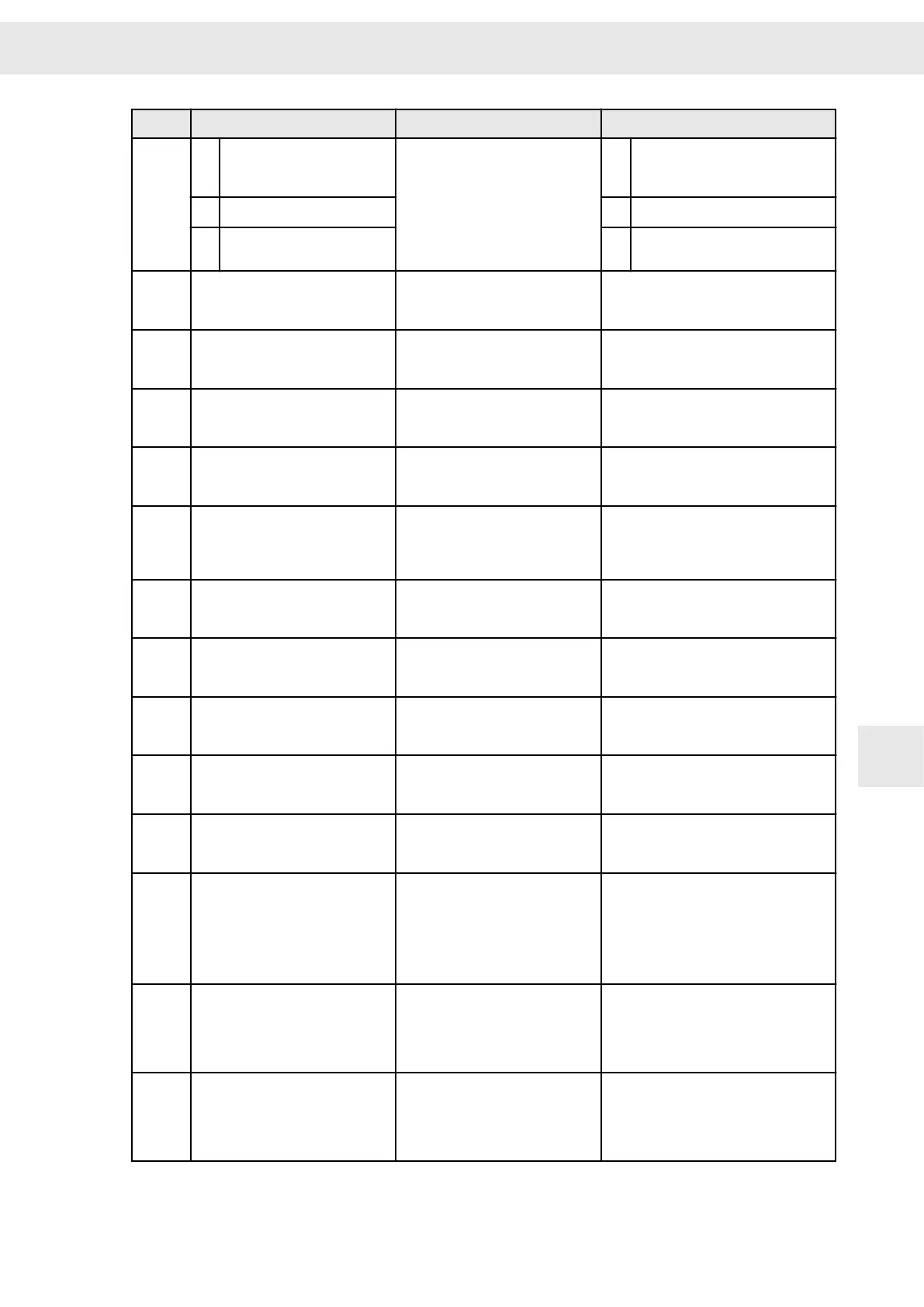
Code Error message Error reaction Possible reason
8
Node Guarding
3
8 Communication node monitoring:
monitoring time expired (configu‐
rable)
9
EEPROM error
4
9 Error in EtherCAT EEPROM
10
Heartbeat / Watchdog
2, 3, 4
10 Heartbeat monitoring: monitoring
time expired (configurable)
E12
(0x10C)
(268
d
)
Mains 'Ready for operation' is
missing
Motor is stopped by parameter-
driven ramp and drive is disabled
(controlled standstill).
▶ Power output stage was switched
on, when mains supply was discon‐
nected/interrupted.
E15
(0x10F)
(271
d
)
Endat / Hiperface communication
faulty
Motor is stopped by quick stop
ramp and drive is disabled
(controlled standstill).
▶ Communication of EnDat/Hiperface
is faulty.
E17
(0x311)
(785
d
)
FPGA power output stage shut‐
down
Motor is stopped immediately. ▶ Overload in power supply unit
E18
(0x312)
(786
d
)
Error in spindle selection
Motor is stopped immediately. ▶ Spindle selection was not valid at
“Switch on”.
E25
(0x319)
(793
d
)
Power supply load too high
Drive is stopped by limitation of
motor torque.
▶ Output power of drive is greater
than rated power of power supply
unit, since the dimensioning of
drive and motor are not compatible.
E26
(0x31A)
(794
d
)
Motor temperature too high
Motor is stopped by error ramp
and current limitation.
▶ Wrong parameters entered for the
motor or wrong dimensioning of the
motor
E27
(0x31B)
(795
d
)
Ambient temperature too high
Motor is stopped by error ramp
and current limitation.
▶ Insufficient device cooling
E28
(0x31C)
(796
d
)
Power output stage temperature
too high
Motor is stopped by error ramp
and current limitation.
▶ Insufficient cooling of power output
stage (heat sink)
E29
(0x31D)
(797
d
)
Motor load too high (Motor I²t)
Motor is stopped by error ramp
and current limitation.
(1)
▶ Average motor load is too high due
to mechanical problems
▶ Wrong dimensioning of the motor
E30
(0x31E)
(798
d
)
Power output stage load too high
(I²t)
Motor is stopped by error ramp
and current limitation.
(1)
▶ Average load of output stage is too
high due to mechanical problems
▶ Wrong dimensioning of the drive
E31
(0x31F)
(799
d
)
Speed error or slip too high
SERVO / VECTOR: Drive is
limited by current monitoring via
short-circuit of the motor phases.
(1)
HSPWM: Drive is stopped by error
ramp and current limitation.
▶ Motor is not able to comply with the
set speed (e.g. defective motor,
mechanical problems, wrong para‐
meters), failure of the measuring
system
E33
(0x521)
(1313
d
)
Power supply load monitoring ->
mains voltage too high
Power supply unit will be discon‐
nected from mains.
▶ Parameterized mains voltage does
not match the connected voltage
▶ Device connected incorrectly
▶ Heavy fluctuation of the power
supply towards overvoltage
E34
(0x522)
(1314
d
)
Power supply load monitoring ->
mains voltage too low
Power supply unit will be discon‐
nected from mains.
▶ DC link was not precharged to the
minimum voltage level in the set
time period; mains voltage is
connected to the short-circuited DC
link
W
Status Display and Error Messages
Drive Amplifier SD2B / SD2B plus - Hardware Description 61
10