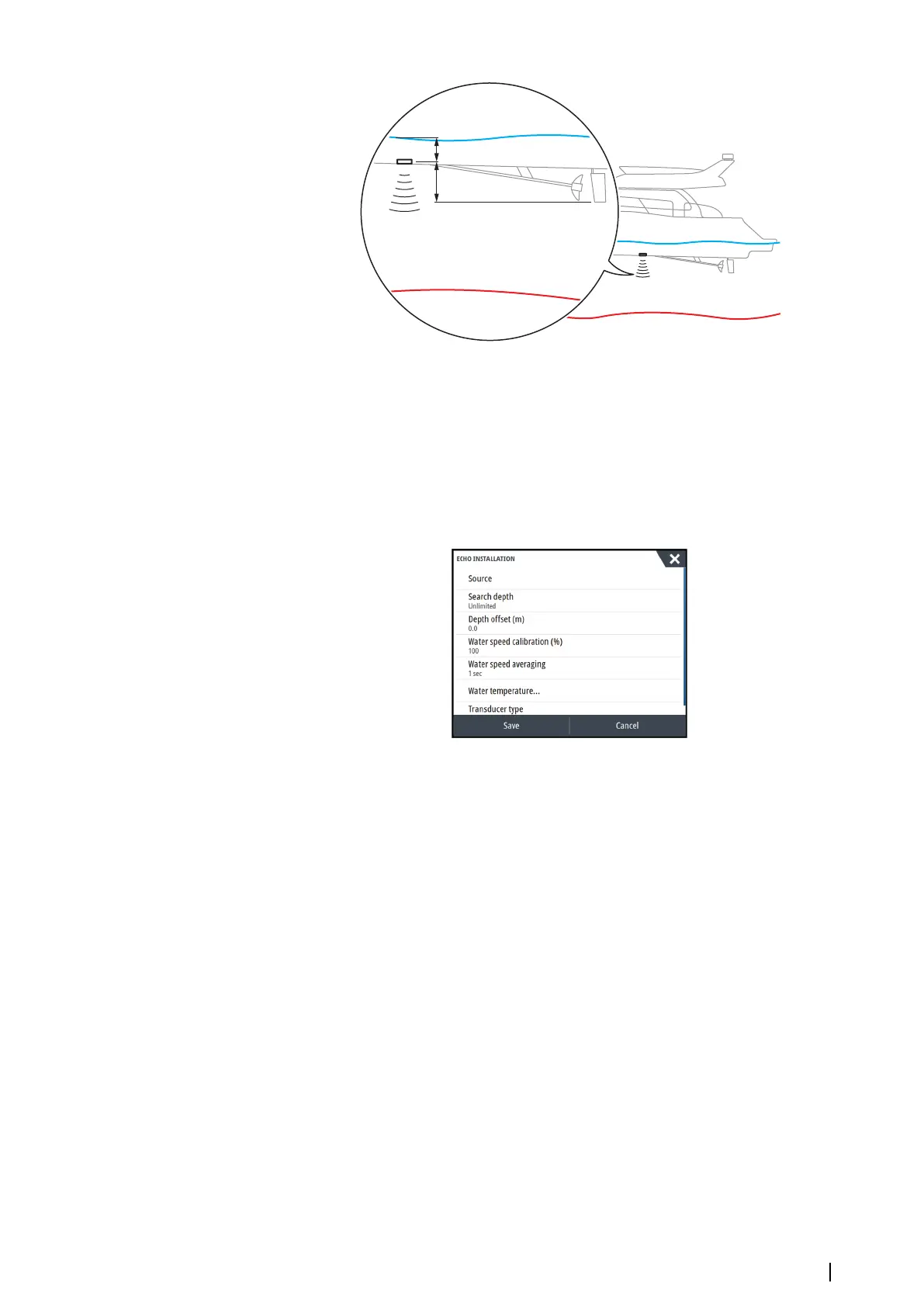
• To show the depth from the lowest point of the vessel to the bottom, set the offset equal
to the vertical distance between the transducer and the lowest part of the vessel, A
(negative value).
• To show the depth from the water surface to the bottom, set the offset equal to the
vertical distance between the transducer and the water surface, B (positive value)
• For depth below transducer, set the offset to 0.
Installation
Use this dialog to setup and configure available sources.
Source
Select this option to display a list of sources available for setup. The settings you make in the
rest of the dialog pertain to the source selected.
Search depth
Noise may cause the echosounder to search for unrealistic depths. By setting the search
depth manually the system displays echoes received from objects within the set depth
range.
Depth offset
All transducers measure water depth from the transducer to the bottom. As a result, water
depth readings do not account for the distance from the transducer to the lowest point of
the boat in the water or from the transducer to the water surface.
System setup | NSO evo3S MPU Installation Manual
27