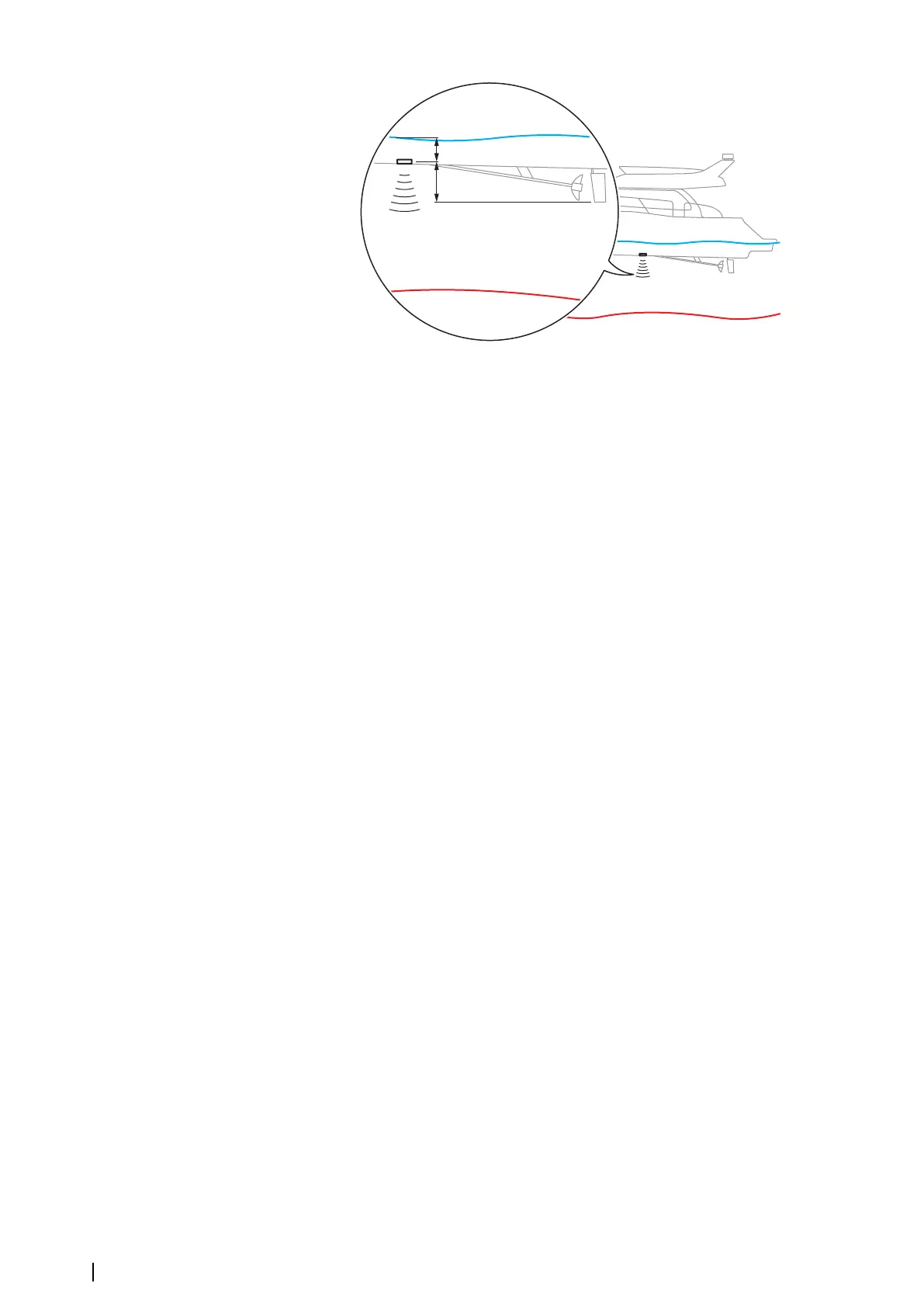
• To show the depth from the lowest point of the vessel to the bottom, set the offset equal
to the vertical distance between the transducer and the lowest part of the vessel, A
(negative value).
• To show the depth from the water surface to the bottom, set the offset equal to the
vertical distance between the transducer and the water surface, B (positive value)
• For depth below transducer, set the offset to 0.
Water speed calibration
Water speed calibration is used to adjust the speed value from the paddle wheel to match
the actual boat speed through the water. Actual speed can be determined from GPS speed
over ground (SOG) or by timing the boat over a known distance. Water speed calibration
should be performed in calm conditions, with minimal wind and current movement.
Increase this value above 100 % if the paddle wheel is under reading, and decrease this value
if it is over reading. For example, if the average water speed reads 8.5 knots (9.8 MPH) and
SOG records 10 knots (11.5 MPH) the calibration value needs to be increased to 117 %. To
calculate the adjustment, divide the SOG by the paddlewheel speed, and multiply the
product by 100.
Calibration range: 50-200 %. Default is 100 %.
Water speed averaging
Averages water speed by measuring your speed at a selected interval of time. Water speed
intervals range from one to thirty seconds. For example if you select five seconds, your
displayed water speed will be based on averaging over 5 seconds of sampling.
Calibration range: 1-30 seconds. Default is 1 second.
Water temperature calibration
Temperature calibration is used to adjust the water temperature value from the sonar
transducer. It may be required to correct for localized influences to the measured
temperature.
Calibration range: -9.9° - +9.9°. Default is 0°.
Ú
Note: Water temperature calibration only appears if the transducer is temperature
capable.
Transducer type
Ú
Note: The transducer type is automatically set for transducers that support Transducer ID
(XID) and is not user selectable.
Transducer type is used for selecting the transducer model connected to the sonar module.
The transducer selected will determine what frequencies the user can select during sonar
operation. In some transducers with built-in temperature sensors, the temperature reading
may be inaccurate or not available at all if the wrong transducer is selected. Transducer
temperature sensors are one of two impedances - 5k or 10k. Where both options are given
for the same model transducer, refer to paperwork supplied with transducer to determine
impedance.
28
System setup | NSO evo3S MPU Installation Manual