Speed source
Stabilization mode
available
Restrictions
Speed LOG (Dual axis)
Sea and Ground (depending
on the transducer)
None
EPFS Ground None
Manual Sea Yes
Auto drift Ground Yes
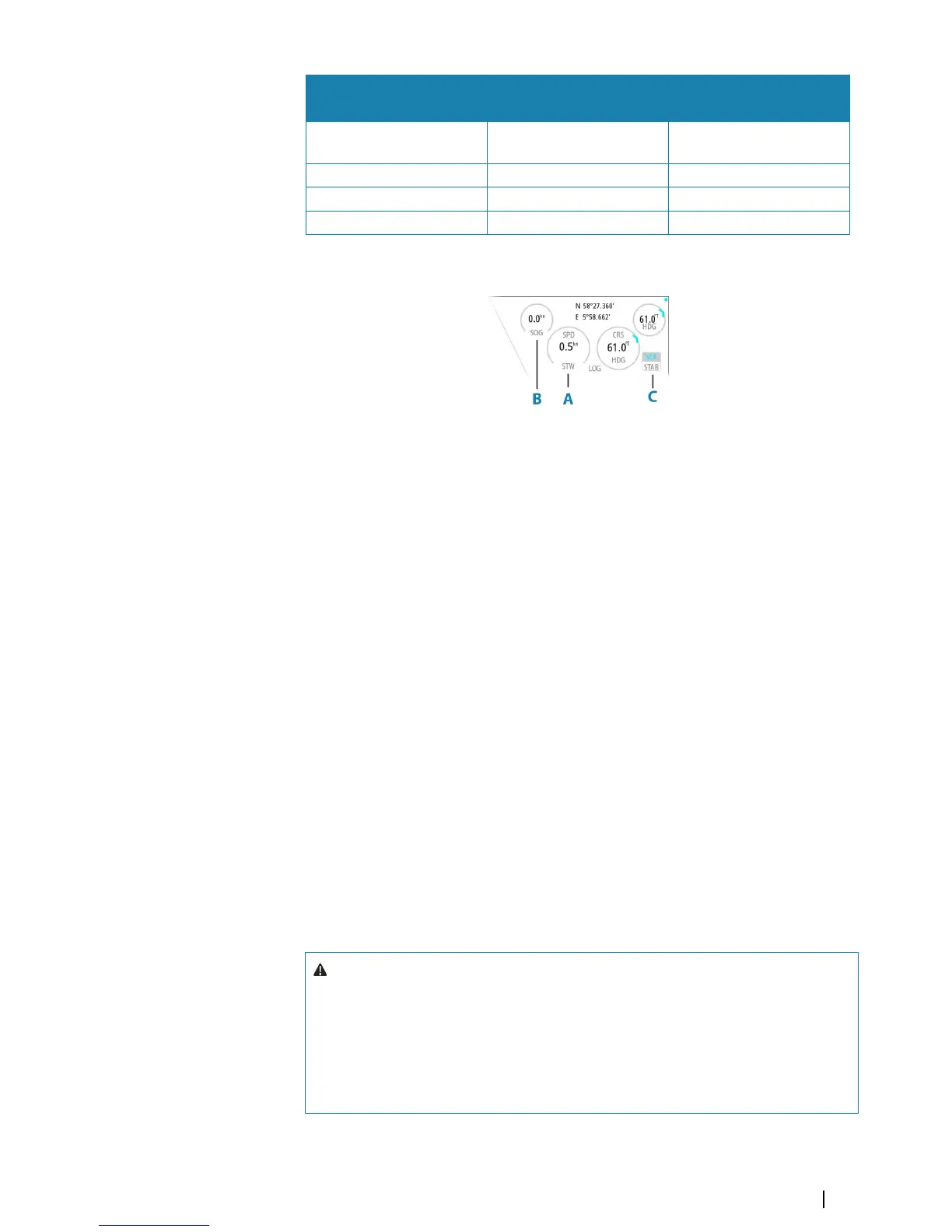
Primary speed source (A), secondary speed source (B) and stabilization mode (C) are shown
in the own ship information panel.
Ú
Note: In case of unsafe data integrity the vessel coordinates are highlighted with yellow
color.
Speed log
The speed log can be single or dual axis input, and either water track or bottom track.
Therefore the stabilization mode available can be either sea or ground depending on the
sensor in use.
Ú
Note: The speed through water measured close to the hull is affected by the tide and by
the current, so from time-to-time it will differ significantly from the speed over the
ground. A speed log measuring speed through water may, in specific cases, be affected
by poor conditions due to e.g. air or ice below the sensor. If the sensor measures only the
longitudinal component of the speed, the transversal ship component is unknown to
the radar.
EPFS
The EPFS provides true speed and true course over ground.
Manual speed
When this option is selected you can manually enter speed, drift and set (heading).
Ú
Note: Manual speed is not available if AIS is turned ON.
Auto drift
When this option is selected the system uses a stationary tracked target as speed reference
for calculating own ship speed. The function is used when no speed sensors are available.
Ú
Note: The auto drift option is only available if the AIS function is OFF and if a target is set
as reference.
Warning: The echo used as reference must be a stationary target.
Otherwise all speed calculated will not be true, but only relative to the
reference target. It is wrong to select a ship that is anchored as a reference;
no alarm will be signaled when the ship starts to move and all the
calculated true speed will change to erroneous values. The reference echoes
should never be used to calculate relative speed. This data is not following a
speed change with adequate accuracy for an anti-collision system.
Basic operation | R5000 Operator manual
21