Detail Using a waypoint means applying the taught relationship between the feature and the
TCP from the Move command. The relationship between the feature and the TCP,
applied to the current selected feature, achieves the desired TCP location. The robot
calculates how to position the arm to allow the current active TCP to reach the desired
TCP position.
Configuring Waypoints
Description Waypoints can be configured in different ways depending on the setup, application
and position of the waypoint in the robot program.
Naming
Waypoints
Waypoints automatically get a unique name when you add them to the robot program.
The user can change the name of a waypoint.
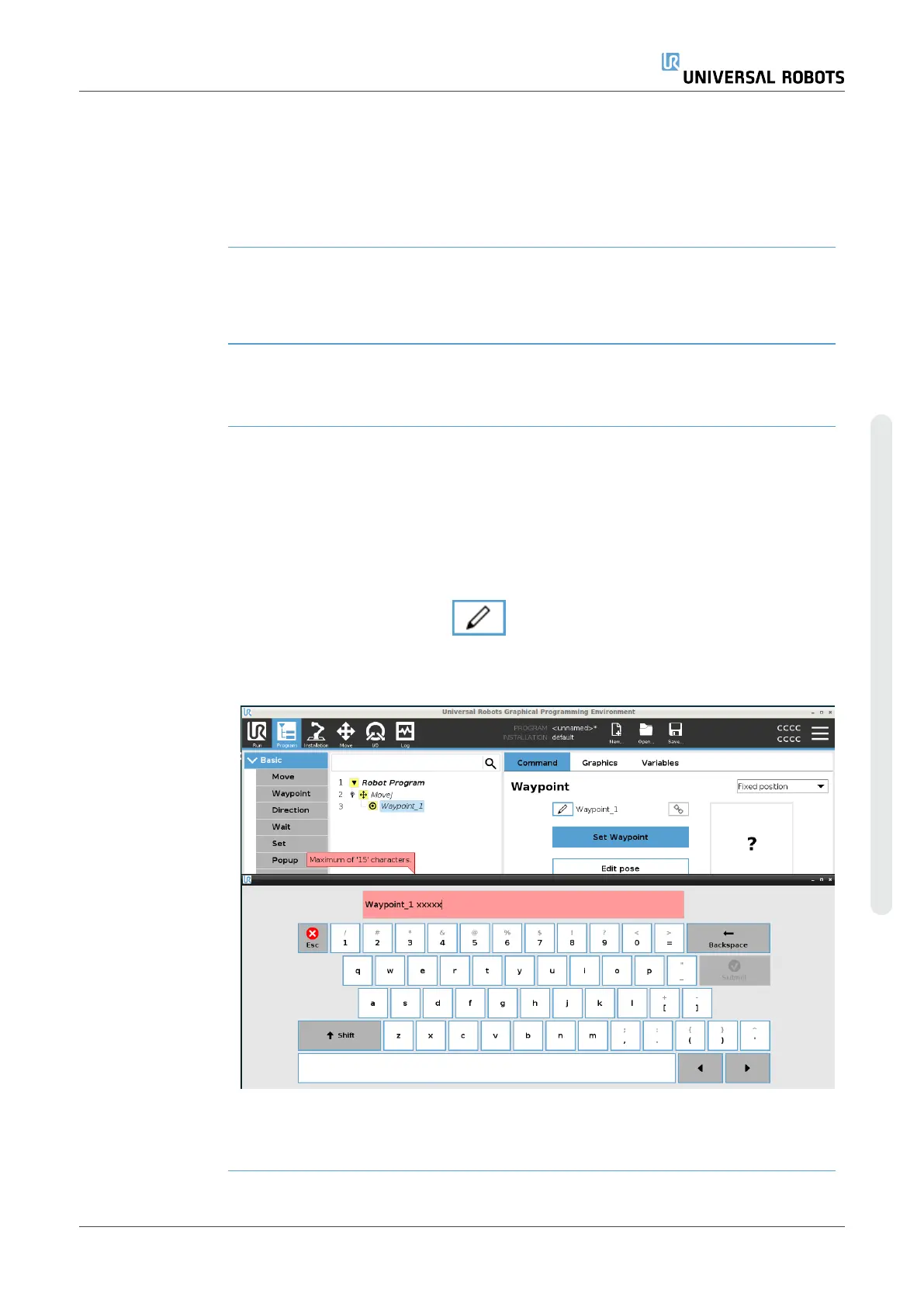
To name a
waypoint
1. Make sure you are positioned on the Command tab on the right side of the
screen
2. Select the waypoint you wish to rename
3.
Tap the Rename button
4. Type the new name
5. Tap Submit to save the new name
Tip In a large robot program, you can often have more than 50 waypoints, so create a
naming rule that makes sense to you.
User Manual 201 UR10e
Copyright © 2009–2024 by UniversalRobotsA/S. All rights reserved.