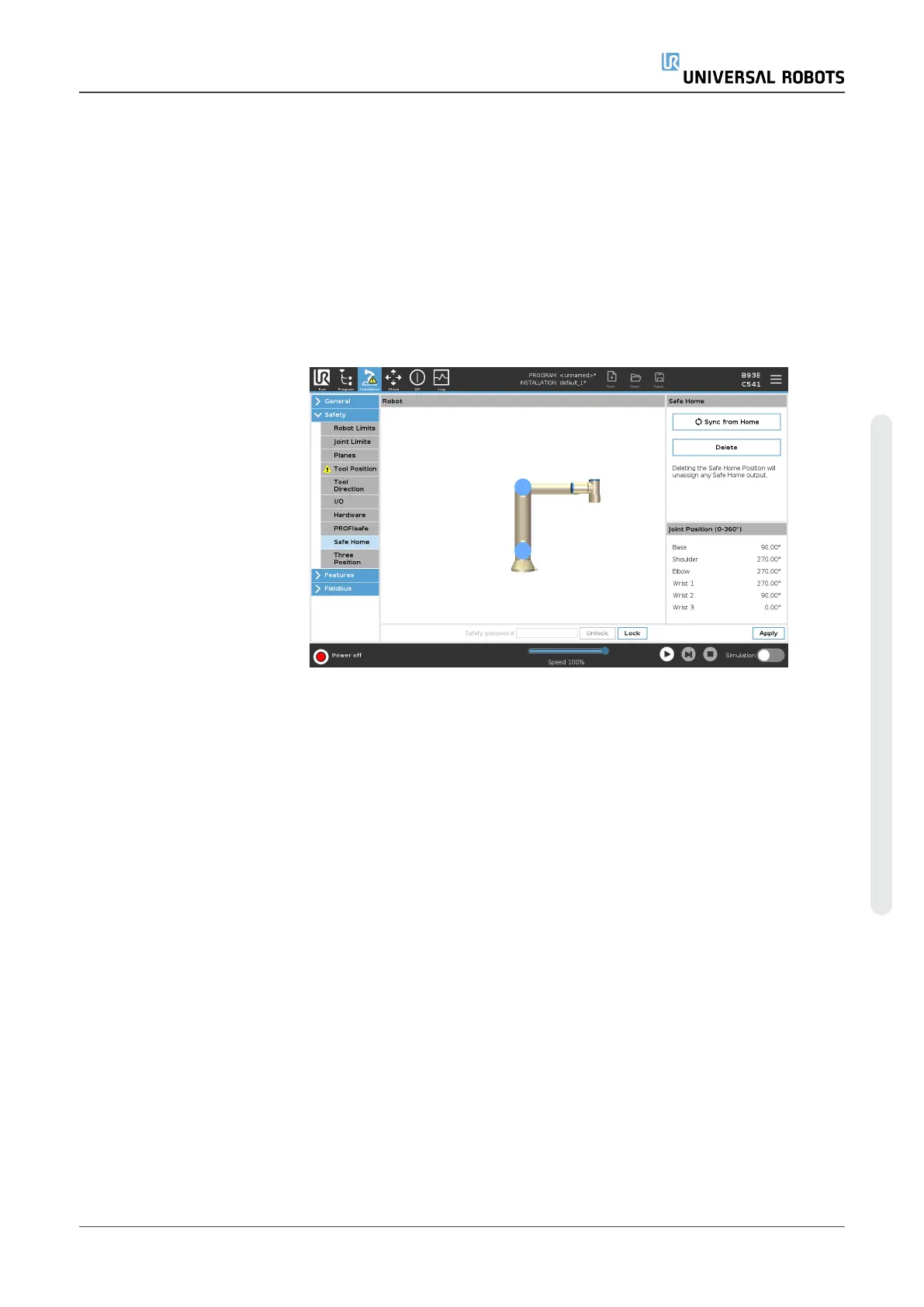
3.2.9. Safe Home Position
Description Safe Home is a return position defined by using the user-defined Home
Position.
Safe Home I/Os are active when the Robot Arm is in the Safe Home
Position and a Safe Home I/O is defined.
The Robot Arm is in the Safe Home Position if the joint positions are at the
specified joint angles or a multiple of 360 degrees thereof.
The Safe Home Safety Output is active when the robot is standing still at
the Safe Home Position.
Syncing from Home To sync from Home
1. In the Header, tap Installation.
2. In the Side Menu on the left of the screen, tap Safety and select
Safe Home.
3. Under Safe Home, tap Sync from Home.
4. Tap Apply and in the dialog box that appears, select Apply and
restart.
Safe Home Output The Safe Home Position must be defined before the Safe Home Output
(see 3.2.7. Safety I/Oon page132).
Defining Safe Home
Output
To define Safe Home Output
1. In the Header, tap Installation.
2. In the Side Menu on the left of the screen, under Safety, select I/O.
3. On the I/O screen in the Output Signal, under Function Assignment,
in drop-down menu, select Safe Home.
4. Tap Apply and in the dialog box that appears, select Apply and
restart.
User Manual 148 UR5e
Copyright © 2009–2023 by UniversalRobotsA/S. All rights reserved.