CAUTION
Failure to configure the maximum speed limit can result in hazardous
situations.
•
If the robot is used in manual hand-guiding applications with linear
movements, the speed limit must be set to maximum 250mm/s for
the tool/end effector and elbow unless a risk assessment shows that
higher speeds are acceptable. This will prevent fast movements of
the robot elbow near singularities.
NOTICE
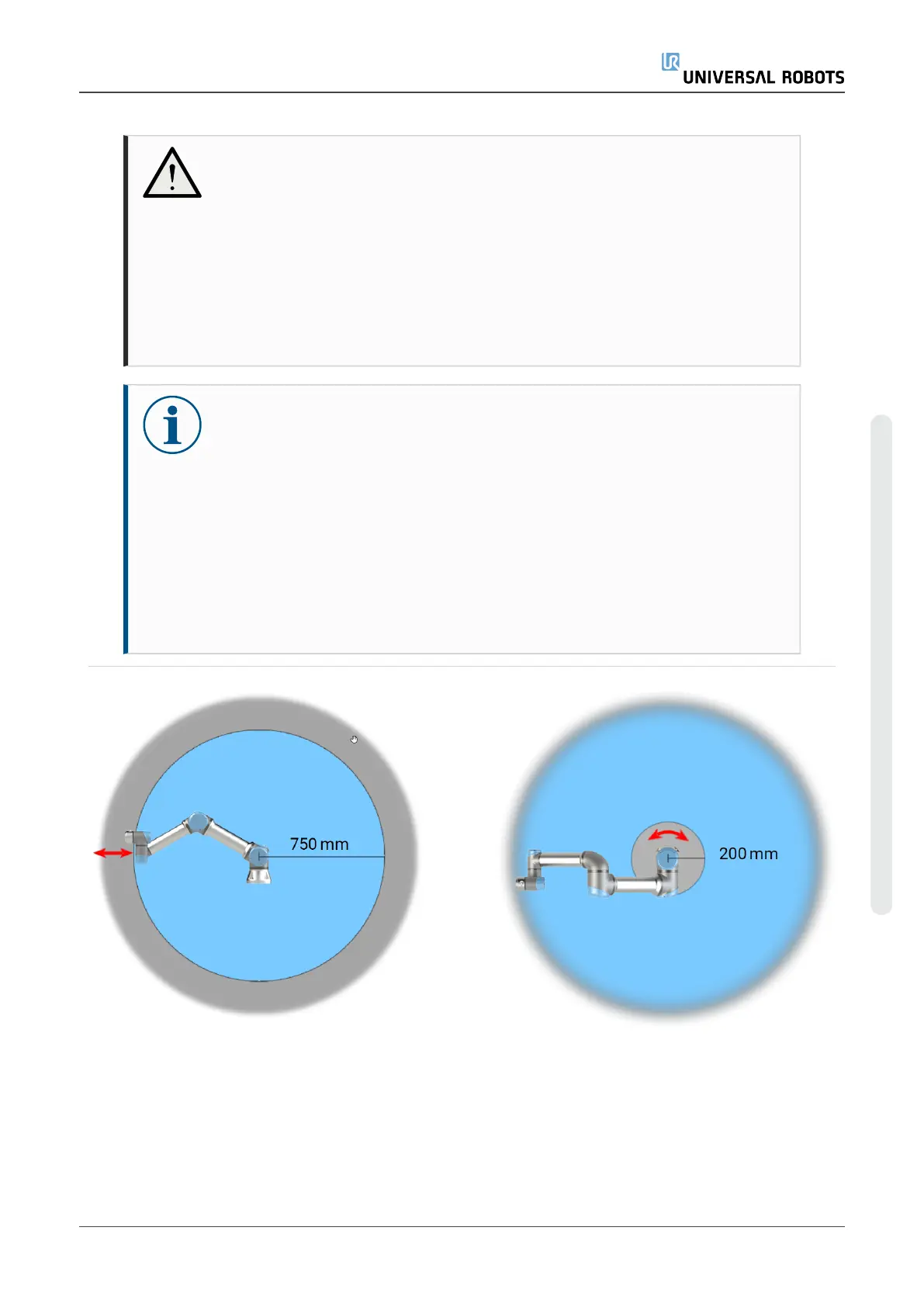
There are two exceptions to the force limiting function that are important
when designing an application (Figure ). As the robot stretches out, the
knee-joint effect can give high forces in the radial direction (away from the
base) at low speeds. Similarly, the short leverage arm, when the tool/end
effector is close to the base and moving around the base, can cause high
forces at low speeds. Pinching hazards can be avoided by removing
obstacles in these areas, placing the robot differently, or by using a
combination of safety planes and joint limits to eliminate the hazard by
preventing the robot moving into this region of its workspace.
1.2:
Due to the physical properties of the robot arm, certain workspace areas require attention
regarding pinching hazards. One area (left) is defined for radial motions when the wrist 1 joint is
at least 750 mm from the base of the robot. The other area (right) is within 200mm of the base of
the robot, when moving tangentially.
The robot also has the following safety inputs:
User Manual UR5e
Copyright © 2009–2023 by UniversalRobotsA/S. All rights reserved.