Adjusting
Acceleration/Deceleration
Settings
1. In the Header, tap Installation.
2. In the In the Side Menu on the left, under General, select
Smooth Transition.
3. Select Hard to have a higher acceleration/deceleration
or select Soft for the smoother default transition setting.
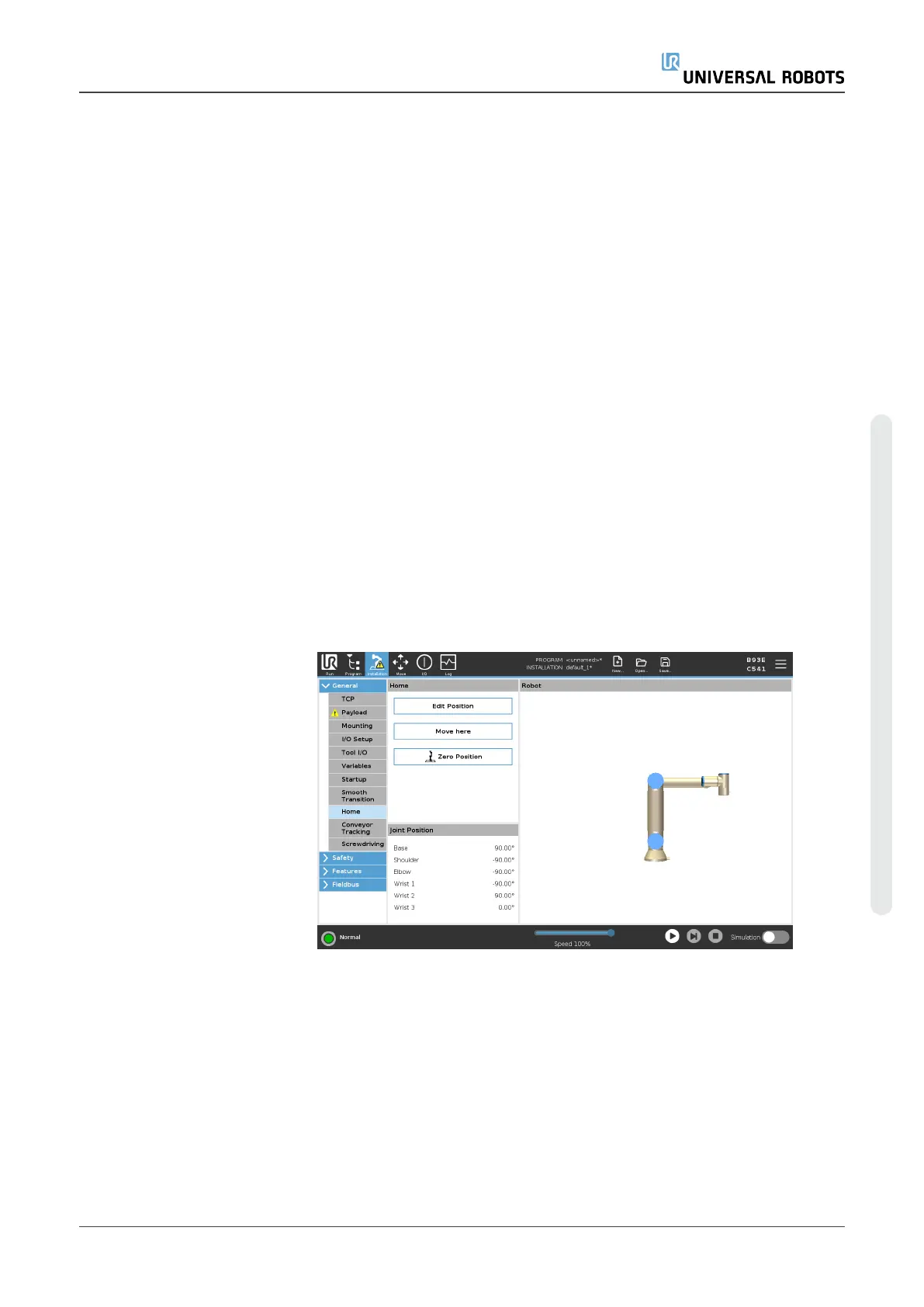
3.5.9. Home
Description Home is a user-defined return position for the Robot Arm. Once defined,
the Home Position is available when creating a robot program. You can
use the Home Position to define a Safe Home Position. (See3.2.9. Safe
Home Positionon page148) Use the Home screen buttons for the
following:
•
Edit Position modifies a Home Position.
•
Move here moves the Robot Arm to the defined Home Position.
•
Zero Position returns the Robot Arm to an upright position.
Defining Home 1. In the Header, tap Installation.
2. Under General, select Home.
3. Tap Set Position.
4. Teach robot using either Freedrive or Transition buttons.
User Manual 292 UR5e
Copyright © 2009–2023 by UniversalRobotsA/S. All rights reserved.