上海维宏电子科技股份有限公司
Weihong Electronic Technology Co., Ltd.
Specialized, Concentrated, Focused - 85 -
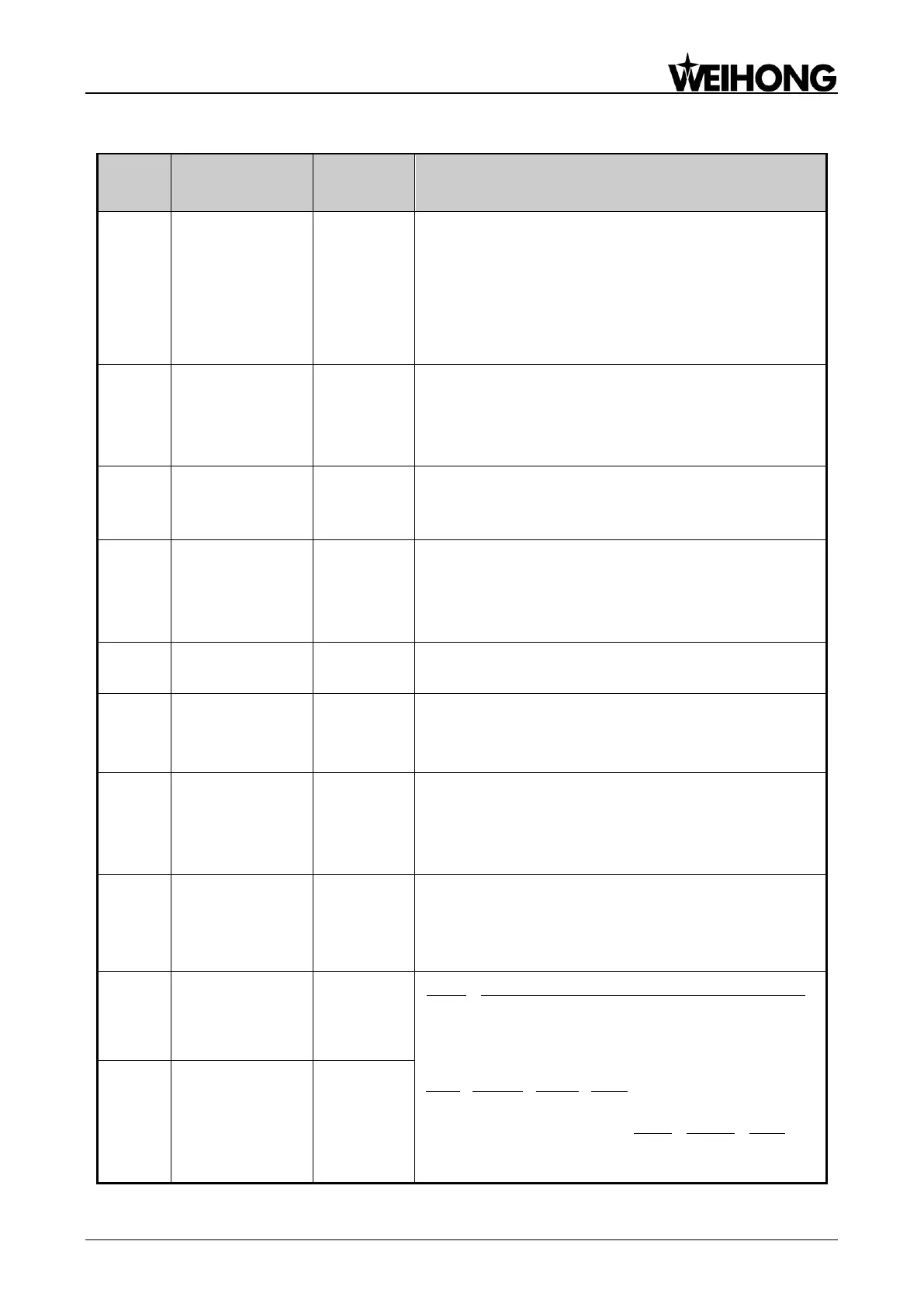
5.4.2.3 Parameter Setting of YASKAWA Σ–Ⅴ/ Σ–7 Servo Driver
Parameter input
prohibition
setting
Set [0000]:
modification to user parameters [PnXXX] and part of
auxiliary function parameters [FnXXX] permitted;
Set [0001]:
modification to user parameters [PnXXX] and part of
auxiliary function parameters [FnXXX] prohibited.
Function
selection basic
switch 0
Bit 0: Set 0, positive rotation at positive rotation
command.
Bit 1: Set 1, position control mode (pulse sequence
command).
Format selection
switch of position
control command
Bit 0: Set 5, select the instruction mode as ―pulse +
direction‖, negative logic.
Bit 1: Set 0, Servo ON /S-ON, input from the 40th pin;
Set 7, Servo ON all the time.
Bit 3: Set 8, positive rotation not used and signal input
(P-OT) prohibited.
Bit 0: Set 8, negative rotation not used and signal input
(N-OT) prohibited.
Output signal
selection 2
Set it when servo motor with brakes.
Bit 2: Set 3, brake interlock signal ―/BK‖ is output from
CN1-29, CN1-30 to control 24V relay used for brake.
Output signal
selection 1
Set it when servo motor with brakes
To avoid of CN1-29 and CN1-30 being used for other
function and leading to brake ineffective, 3 is not
allowed to appear in the 4 digits.
Brake
instruction- servo
OFF and time
delay
Set it when motor with brakes.
Default setting is ―0‖, setting unit is ms.
Electronic gear
ratio (numerator)
Pn20E Encoder resolution Pulse equivalent Deceleration ratio
Pn210 Screw pitch
For example, screw pitch 5mm, 20-bit encoder,
deceleration ratio 1:1, pulse equivalent 0.001mm,
20
Pn20E 2 0.001 1048576 131072
Pn210 5 5000 625
When screw pitch is 10mm,
Pn20E 1048576 65536
Pn210 10000 625
For a rotary axis with 13-bit encoder and deceleration
Electronic gear
ratio
(denominator)