Appendix TPM
+
en-36 4022-D018396 Revision: 07
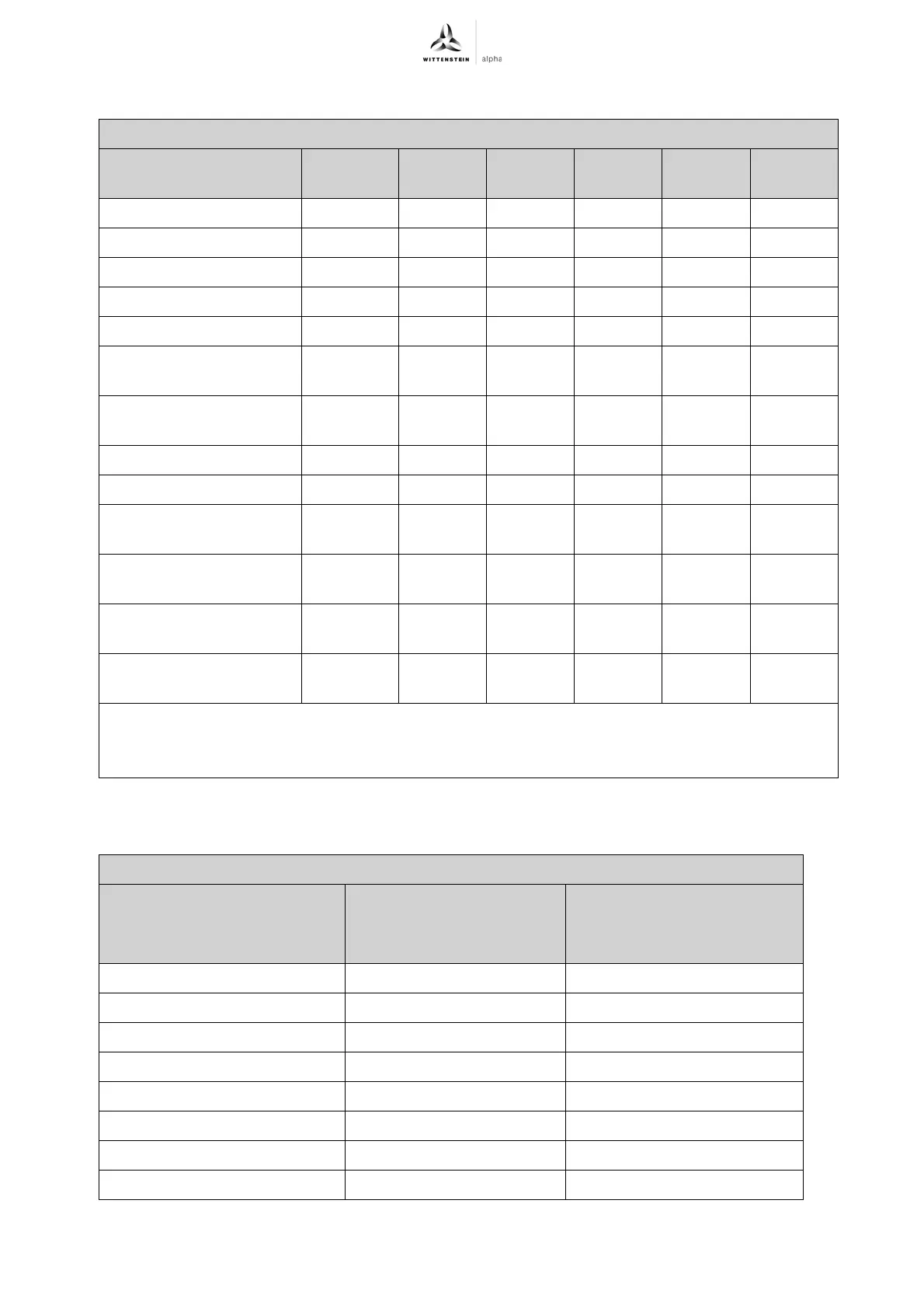
9.4.12 Motor data, TPM
+
power 560V, i = 40 – 100
9.4.13 Technical specifications, Resolver
General data
Unit TPM
+
004
TPM
+
010
TPM
+
025
TPM
+
050
TPM
+
110
Stator length mm 15 15 15 15 30
Pole pair number p p 46666
Maximum torque T
max
Nm 1.9 4.4 7.8 15.6 44.2
Maximum current I
max
* Aeff 3 6 12 33 50
Maximum speed rpm 6000 6000 6000 5000 4500
Continuous stall torque
T
0
Nm 0.66 1.38 3 5.4 20.74
Continuous stall
current I
0
*
Aeff 1.0 1.86 4 7.5 21.9
Torque constant K
t
Nm/Aeff 0.78 1.02 0.97 0.91 1.08
Voltage constant K
e
Veff/krpm 47.4 61.3 58.7 55.1 65.3
Winding resistance at
20 °C terminal-terminal
Ohm 40 13.5 4 1.81 0.25
Winding inductance
terminal-terminal
mH 30 18.9 11.1 5.1 1.9
Electrical time constant
T
e
msec 0.8 1.4 2.8 2.8 7.6
Max. winding
temperature θ
max
°C 155 155 155 155 155
* Depending on the static and dynamic loads as well as the lambda factor, the continuous stall
current and the maximum current of the motor needs to be limited if necessary.
You can determine the design for each case with our design software cymex
®
.
Tbl-28: Motor data, TPM
+
power 560V, i = 40 – 100
Ordering code: TPMxxxxx-xxxR-xxxx-xxxx-xx-xxx
TPM
+
dynamic 004 TPM
+
dynamic 010 – 110
TPM
+
high torque 010 – 110
TPM
+
power 004 – 110
Size Size 08 Size 15
Type TS2605 N31 E64 TS2620 N21 E11
Pole pair number p 11
Input voltage 7Veff 10kHz 7Veff 10kHz
Ratio 0.5+-5% 0.5+ -5%
Fault +- 10'max +- 10'max
Zero voltage 20mVeff max 20mVeff max
Phase shift +10° nominal 0° nominal