1. System Installation Requirements
1-6
TI 33J01J10-01EN
n Vibration
Vibration in the control room should be limited as follows:
2
or less.
acceleration:
(m/s
2
) = 4π
2
x A x F
2
x 10
-3
A: Displacement amplitude (mm)
F: Frequency (Hz)
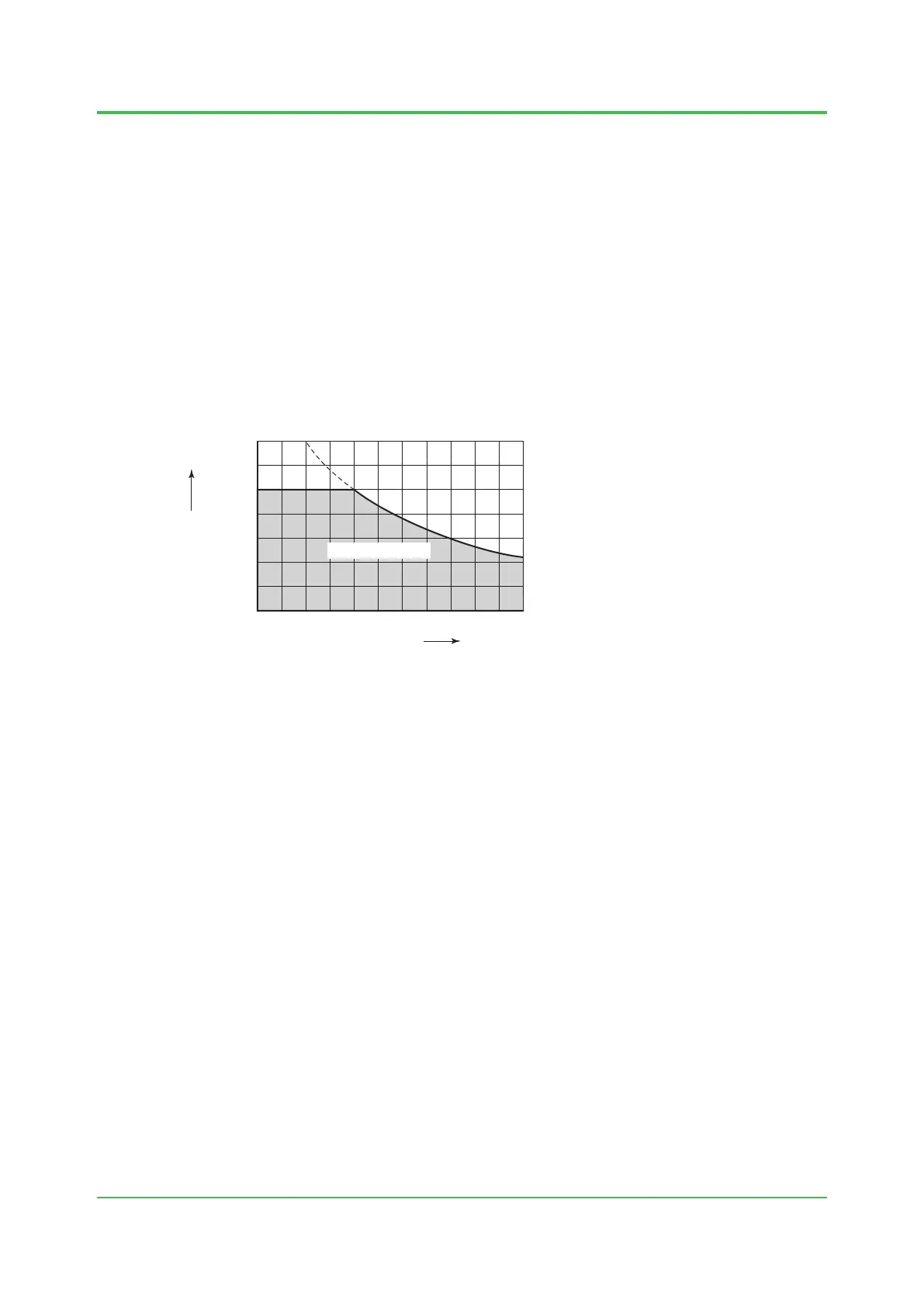
The allowable range of displacement amplitude is shown below. Consult Yokogawa if complex
0.3
0.2
0.1
10 11 12 13 14 15 16 17 18 19 20 21
Allowable range
Vibration frequency
amplitude
Figure Range of Allowable Displacement Amplitude
n Air Purity
3
2
S), sulfur dioxide (SO
2
and carbon.
The allowable content of H
2
S, SO
2
n Magnetic Field
Jan. 21, 2019-00

 Loading...
Loading...