ACS 160 User’s Manual 43
Application Macro Positioning
This macro is intended for simple positioning tasks. The default operation is appropriate for conveyor
systems where items are repetitively moved a certain distance in the same or opposite direction.
Distance is measured by calculating pulses from an encoder. When the distance has been travelled
i.e. desired position reached, the drive stops and waits for a new start. Simultaneously, the output
relay activates signalling that target position has been reached, refer to Figure 2.
Homing is an additional configurable feature selected with parameters. Homing means that the load
is driven at slow speed to known position (home position).
The value of parameter 9902 is 14 (
POSITIONING).
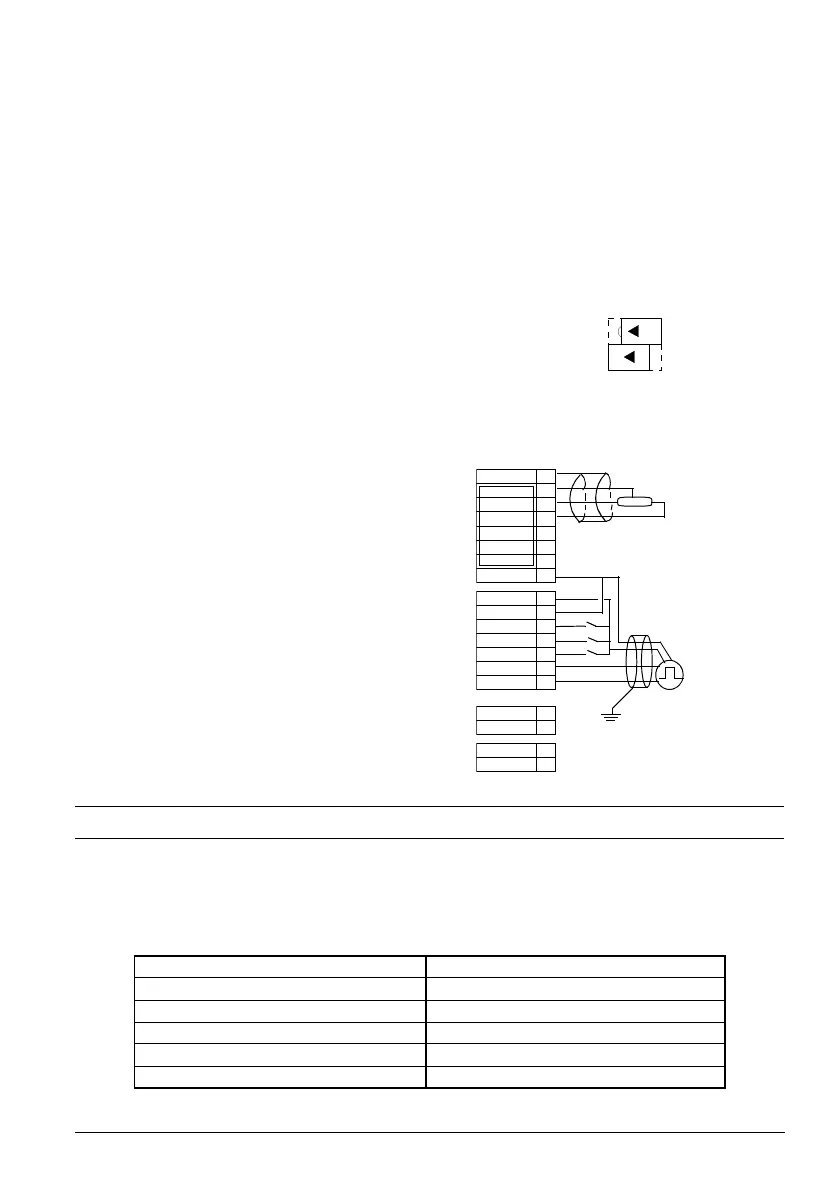
Connection example.
Note! After selecting the macro, turn power off and then on again.
• The encoder should be mounted on the axis of the motor.
• Use parameters 8207 - 8210 to adjust the target positions according to the application.
• Described default functionality is valid from ACS 160 SW version 1.0.0.F.
Positioning default parameter values:
Input signals Output signals DIP switch
• Start, stop (DI1) • Relay output 1: Fault
• Positioning/Jogging select (DI2) • Relay output 2: Target reached
• Target position select (DI3)
• Jogging reference (AI1)
• Encoder pulses (DI4 and DI5)
1001
EXT. 1 COMMANDS 1 (DI1) 1201 COST SPEED SELL 0 (NOT SELL)
1002
EXT. 2 COMMANDS 1 (DI1) 1402 RELAY OUTPUT 2 34 (AT TARGET)
1003
DIRECTION 3 (REQUEST) 1601 RUN ENABLE 0 (NOT SELL)
1102
EXT1/EXT2 SELL 2 (DI2) 1604 FAULT RESET SELL 6 (START/STOP)
1103
EXT. REF1 SELECT 1 (AI1) 2105 PRIMING SELL 0 (NOT SELL)
1106
EXT. REF2 SELECT 1 (AI1) 2201 ACT/DEC. 1/2 SELL 0 (NOT SELL)
AI1:
AI2:
0 - 10 V
0(4) - 20 mA
NO
NO
Jog speed
Not used
Start/Stop: Activate to start
Jog/Positioning: Activate to select positioning mode
Target Position: Activate to select position 2
TCLK A; Encoder pulses
Relay output 1, programmable
Default operation: Fault => open
Relay output 2, programmable
Default operation: At target => closed
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
SCR
AI1
AGND
+10V
AI2
AGND
AO1
AGND
+24V
DCOM
DI1
DI2
DI3
DI4
DI5
RO1B
RO2A
RO2B
RO1A
TCLK B; Encoder pulses
Encoder
Ch A
Ch B
Cable length max 3 m
Not used
1024 pulses/rev