II K 4-54
Overview of Software
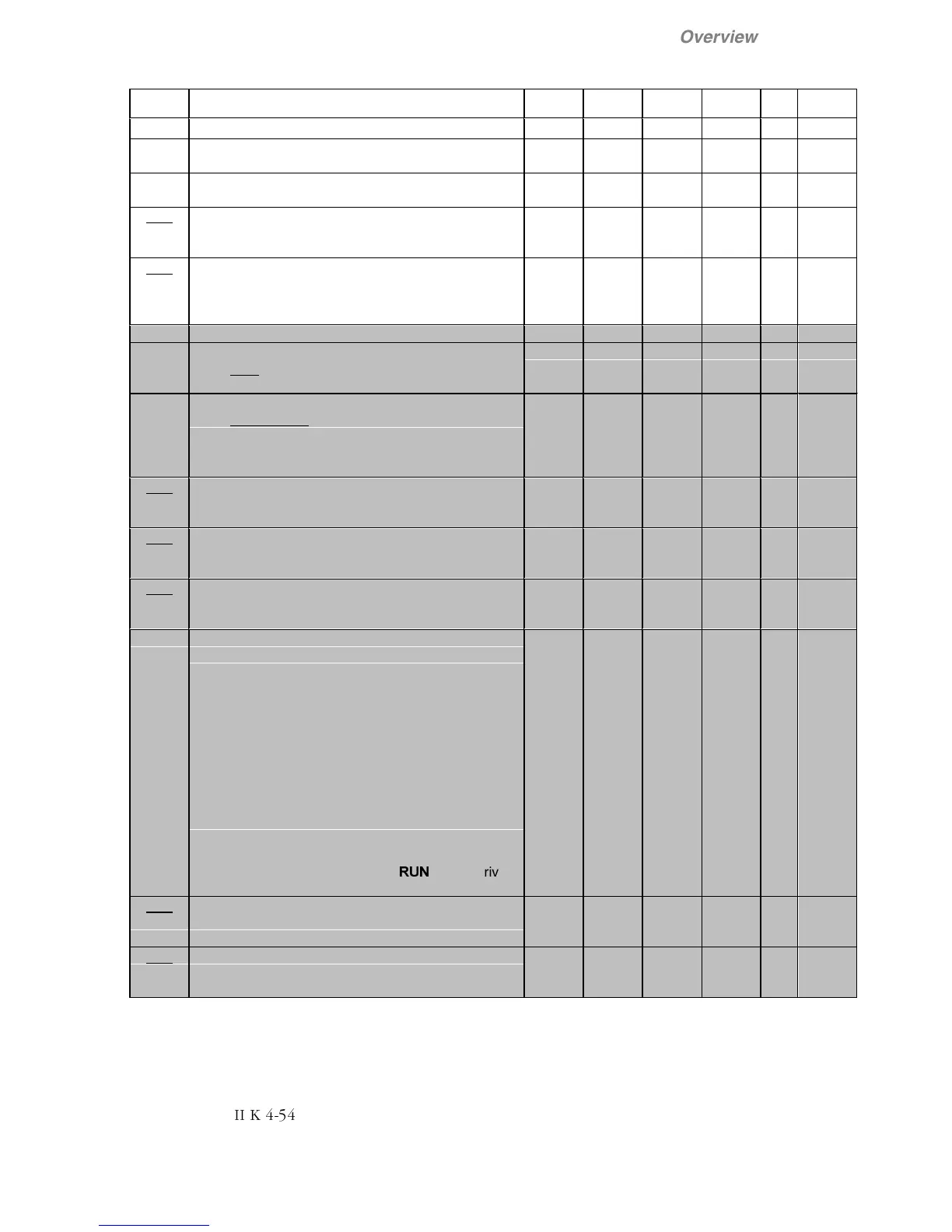
ParNo. Parameter name and significance Min Max Default Unit (1)
custom.
setting
Grp 4 Field
4.01
Signal
Field Cur Ref
Field current reference value in amperes.
---A
4.02
Signal
Field Cur Act
Measured field current actual value in amperes.
---A
4.03
auto-
tuning
Field Cur KP
Proportional gain of the field current controller
(PI controller).
0.000 13.499 0.300 integer
4.04
auto-
tuning
Field Cur TI
Integration time constant of the field current
controller
(PI controller) in milliseconds.
0 5120 200 ms
Long Parameter Menu
4.05 Fld Ov Cur Trip
Field overcurrent tripping in % related to the field
current nominal value (1.03).
0 150 130 %
4.06 Field Low Trip
Field undercurrent tripping value in % related to the
field current nominal value (1.03).
Considerably lower values than the default setting
may be required for field weakening.
5 100 30 %
4.07
auto-
tuning
Field Cur 40%
Field current, at which 40% of field flux is reached.
Proportion of the nominal field current (1.03) in %.
0 100 29 %
4.08
auto-
tuning
Field Cur 70%
Field current, at which 70% of field flux is reached.
Proportion of the nominal field current (1.03) in %.
0 100 53 %
4.09
auto-
tuning
Field Cur 90%
Field current, at which 90% of field flux is reached.
Proportion of the nominal field current (1.03) in %.
0 100 79 %
4.10 Field Heat Ref
Current reference value for the field heating in %
related to the nominal field current value (1.03).
0 = without field heating
>0 = with field heating (heating current in %)
With this parameter, an anti-condensation heating
via the field winding can be implemented for the
motor.
•
The field heating starts 10 s after ON command
(without RUN command).
•
The field heating will switch on automatically
10 s after the drive is stopped (RUN=0) and the
actual speed is lower than Zero Speed Lev
(5.15).
• When the drive starts again (
581
=1) the drive
will switch over to nominal field current.
0 30 0 %
4.11
auto-
tuning
EMF KP
Proportional gain of the EMF controller
(PI controller).
0.000 10.000 0.550 integer
4.12
auto-
tuning
EMF TI
Integration time constant of the EMF controller
(PI controller) in milliseconds.
0 10240 160 ms
(1) no changes possible if the drive is in ON-status