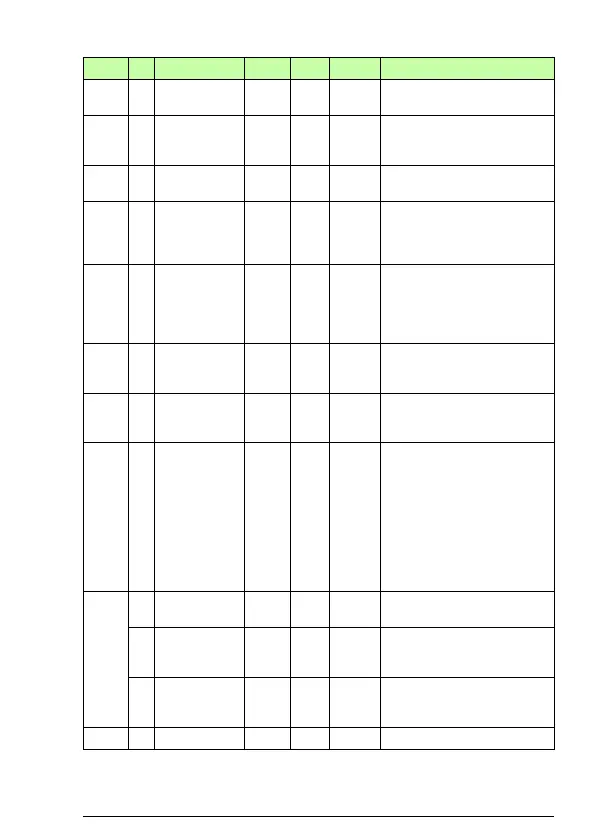
Appendix A – CANopen Object Dictionary 125
6076 0 Motor rated
torque
U32 RW 0 Nominal torque of the motor in
Nm
6077 0 Torque actual
value
I16 R 0 Operational when torque
feedback is available from the
drive
6078 0 Current actual
value
I16 R 0 Actual output current
607A 0 Target position I32 RW - The commanded position that
the drive should move to.
Operational in the profile
position (pp) mode.
6081 0 Profile velocity U32 RW - Velocity normally attained at
the end of the acceleration
ramp during a profiled move.
Cyclic low priority
communication.
6087 0 Torque slope U32 RW - Effective in the profile torque
(tq) operation mode.
Unit: 0.1% / s.
6088 0 Torque profile
type
I16 RW 0 Only 0 = Linear ramp
(trapezoidal profile) is
supported.
6098 0 Homing
method
I8 RW 0 CiA 402 homing methods. See
the drive manual for more
information on the supported
homing modes.
• -128…-1: Manufacturer-
specific
• 0: No homing operation
required
• 1…35: Methods 1 to 35
• 36…127: Reserved
6099 0 Homing
speeds
U8 R 2 Speeds during the homing
procedure
1 Speed during
search for
switch
U32 RW 0 ACSM1 homing speed 1
2 Speed during
search for
zero
U32 RW 0 ACSM1 homing speed 2
60FD 0 Digital inputs U32 R - Drive-specific
Index SI Name Type Acc. Def. Information
 Loading...
Loading...