130 Fault tracing
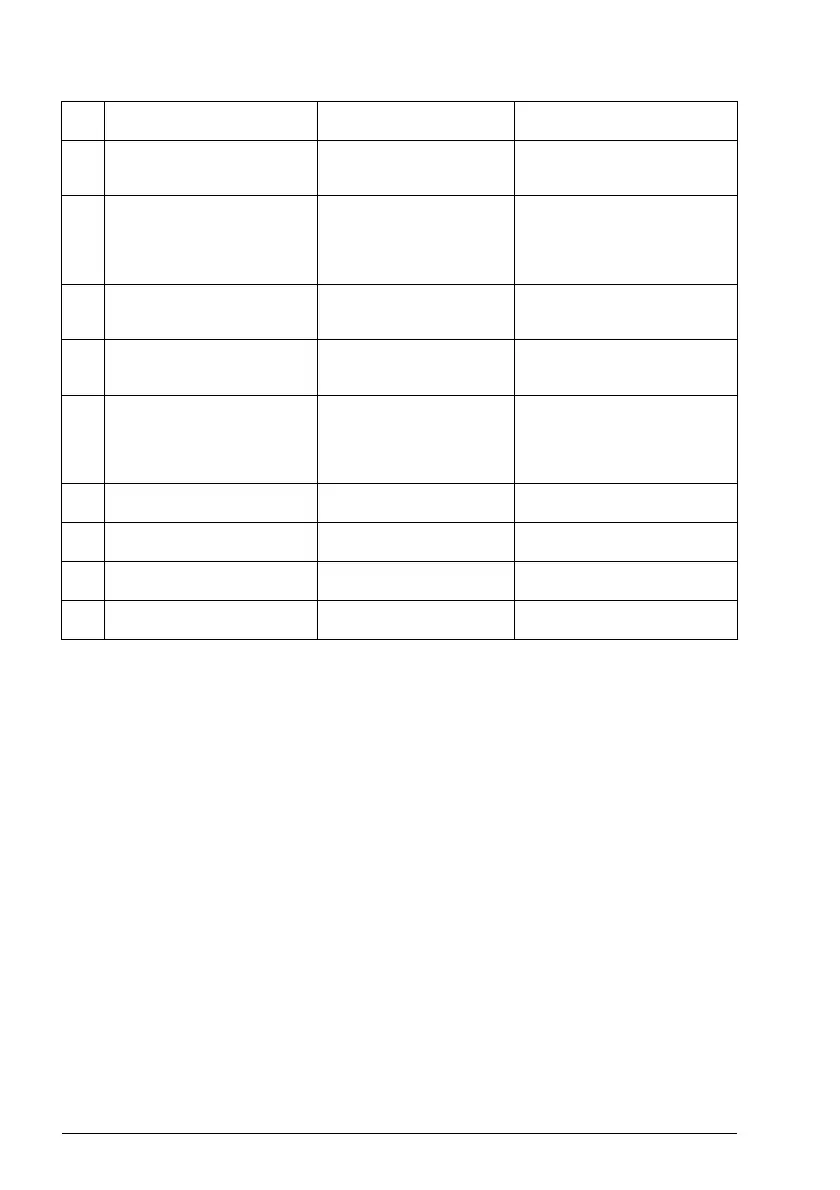
Code Error Cause What to do
4063 Encoder fault
(_ecPOSSIBLE_ENCODER_FAUL
T)
General Encoder fault Check encoder configuration, wiring
and encoder operation when rotating
by hand.
4065 Test move will take too long Test move takes too long time in. Check that test moves are set so that
they will not take an excessive
amount of time, Also check scaling is
set correctly by checking
SCALEFACTOR
4066 Test move velocity is too high Calculated velcoity >
DriveSpeedMax in veloctiy
autotune.
Re-run commissioning and check
that DriveSpeedMax is set correctly
4067 Motor rated current undefined Motor rated current < 0.2A Check Motor data is correct, if the
motor current is below 0.2A then its
too small to be controlled by the drive
4068 Current control loop is not tuned Current loop has not been tuned
before performing the Rotor
parameters autotuning
(applicable to asynchronous
motors only)
Re-run Autotuning
4069 Autotuning doesn't support motor
type
Cannot do the wanted Autotune
for this motor type.
Check Motor data is correct
4070 Can't set flex control proportional
gain
Can't set flux control loop
proportional gain.
Check Motor data is correct
4071 Can't set flex control integral gain Cannot be shown because there
is no error in API.
Check Motor data is correct
4074 Can't set magnetizing inductance Cannot set motor Lm. Check Motor data is correct