Diagnostics and Troubleshooting
78
NHA80945 04/2017
Monitoring of Communication Channel
Command and Reference Channels
All the drive command and reference parameters are managed on a channel-by-channel basis.
Monitoring of Communication Channels
Communication channels are monitored if they are involved in one of the following parameters:
The control word ([Cmd Register] CMd) from the active command channel
The control word containing the command switch (bit configured on [Cmd switching] CCS)
The control word containing the switch for reference value 1'1B (bit configured on [Ref 1B switching]
rCb)
The control word containing the switch for reference value 1'2 (bit configured on [Freq Switch Assign]
rFC)
The reference frequency or reference speed ([Ref Frequency] LFr or LFRD: Nominal speed value)
from the active channel for reference value
Summing reference frequency or reference speed ([Ref Frequency] LFr or LFRD: Nominal speed
value) 2 (assigned to [Summing Input 2] SA2)
Summing reference frequency or reference speed ([Ref Frequency] LFr or LFRD: Nominal speed
value) 3 (assigned to [Summing Input 3] SA3)
Subtracting reference frequency or reference speed ([Ref Frequency] LFr or LFRD: Nominal speed
value) 2 (assigned to [Subtract Ref Freq 2] dA2)
Subtracting reference frequency or reference speed ([Ref Frequency] LFr or LFRD: Nominal speed
value) 3 (assigned to [Subtract Ref Freq 3] dA3)
The reference value given by the PID controller PISP
The PID controller feedback ([AI Virtual 1] AIU1)
The multiplication coefficient of the reference values ([Multiplying coeff.] MFr 2 (assigned to [Ref Freq
2 Multiply] MA2)
The multiplication coefficient of the reference values ([Multiplying coeff.] MFr 3 (assigned to [Ref Freq
3 Multiply] MA3)
As soon as one of these parameters has been written once to a communication channel, it activates
monitoring for that channel.
If a communication warning is sent (in accordance with the protocol criteria) by a monitored port or fieldbus
module, the drive triggers a communication interruption.
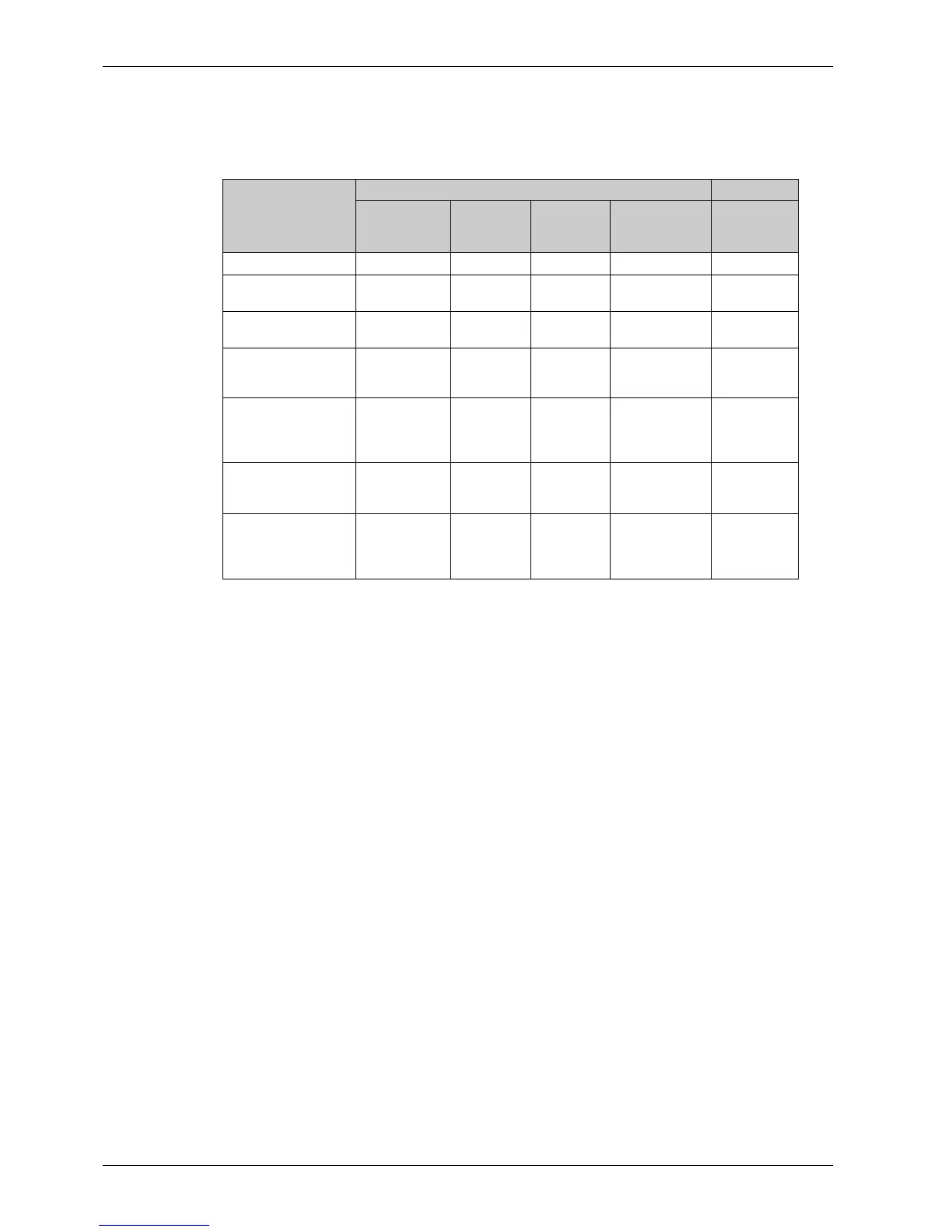
Parameter Name Parameter Code
Taken Into
Account by the
Drive
Modbus
Serial
CANopen Fieldbus Module Ethernet
Embedded
Control word
CMd CMd1 CMd2 CMd3 CMd5
Extended control
word
CMI CMI1 CMI2 CMI3 CMI5
Reference speed
(rpm)
LFrd LFd1 LFd2 LFd3 LFd5
Reference
frequency
(0.1 Hz)
LFr LFr1 LFr2 LFr3 LFr5
Reference for
torque control
mode (0.1% of the
normal torque))
LTR LTR1 LTR2 LTR3 LTR5
Reference value
supplied by PI
controller
PISP PIr1 PIr2 PIr3 PIr5
Reference value
supplied by analog
multiplier
function
MFr MFr1 MFr2 MFr3 MFr5