CB FALCON MODBUS COMMUNICATION
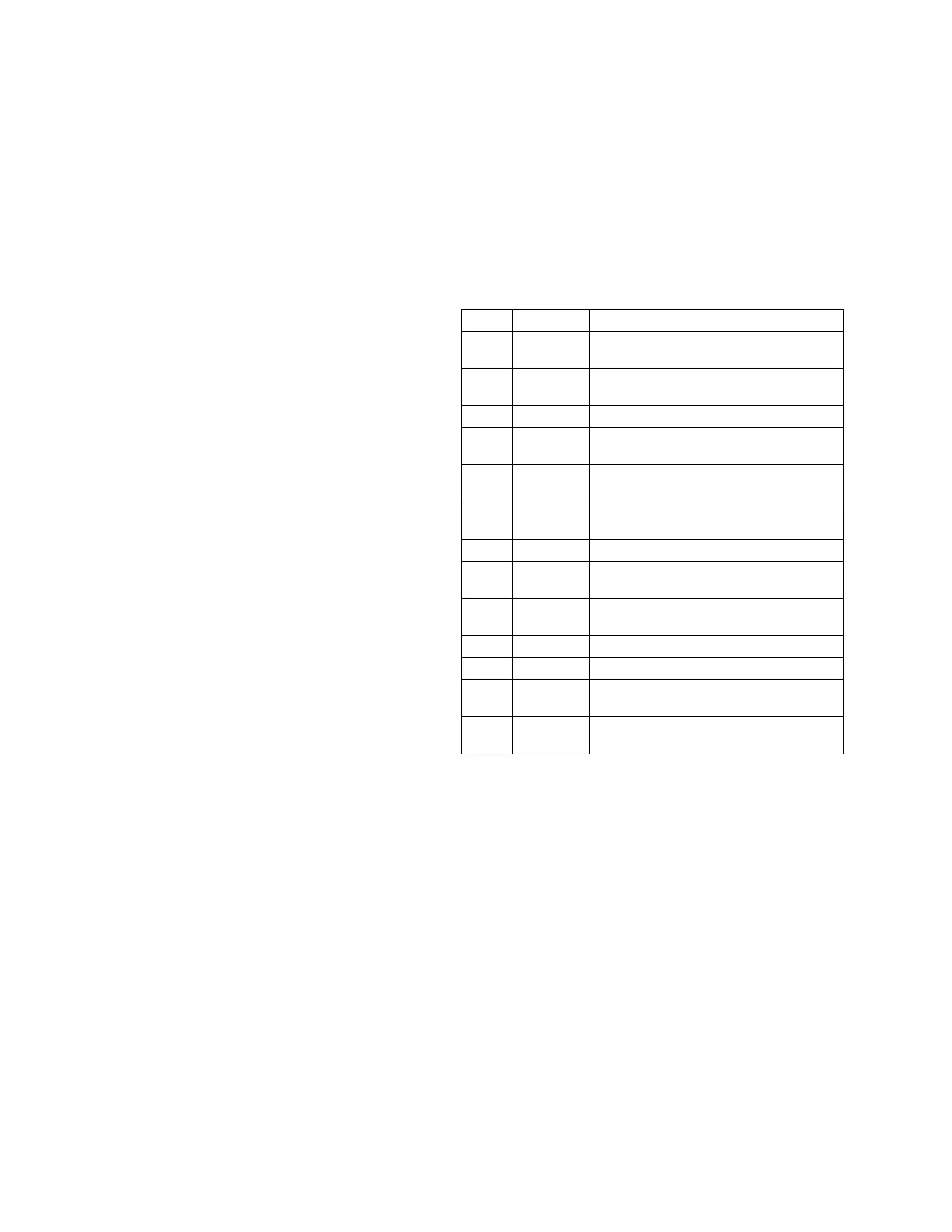
Name Terminal Purpose
S1 J8-4
Inlet temperature or 4-20 mA steam
pressure (0-15 or 0-50 psi)
S2 J8-6
4-20 mA remote control input (setpoint
or modulation)
S3 J8-8 Outlet single non-safety temperature
S4 J8-10
Undefined temperature (called Outlet
operation channel)
S3S4 J8-8 and
J8-10
Outlet dual safety temperature
S5 J8-11
Outdoor, Header (Central Heat), or Mix
temperature
S6 J9-1 DHW single non-safety temperature
S7 J9-3 Undefined temperature (called DHW
operation channel)
S6S7 J9-1 and
J9-3
DHW dual safety temperature
S8 J9-4 Stack single non-safety temperature
S9 J9-6 Heat exchanger temperature
S8S9 J9-4 and
J9-6
Stack dual safety temperature
S10 J10-7 Outdoor or Lead Lag Header (Central
Heat) temperature
Application
Layer
The Falcon Modbus interface supports the following
function codes:
• 03 (0x03) Read Holding Registers
• 06 (0x06) Write Single Register
• 16 (0x10) Write Multiple Registers
• 17 (0x11) Report Slave ID
All the configuration and status data are accessed as 16-bit
holding registers in this interface. Since all Falcon digital
signals accessed in this interface are read only, these digital
signals are mapped to bits within holding registers instead of
coils or discrete inputs, to simplify the interface. Variable
length data are also represented by holding registers and
therefore must be accessed individually and not as part of a
group. The length of the variable length data is returned in
the response. All 32-bit data items are accessed as two
consecutive, 16-bit holding registers, i.e., each item uses 2
register address spaces.
The holding register map is defined in Fig. 1 and Table 4.
Except for variable length data items the registers can be
accessed as a single register or up to 20 registers for writes
and 125 registers for reads. Data is mapped into logical
groups with room for future expansion, so some gaps exist in
the register map.
Data organization is intended to allow for efficient register
access. Status data is organized into register blocks by
application function and a function status change indicator is
used to denote when any data has changed within the register
block since the last time the registers were read (See Fig. 1).
The Falcon sets the status change indicator bit when at least
one of the registers in the functional block has changed value
since it was last read. The Modbus master can read the status
change register and determine which functional register
blocks have changed value since its last access and only read
those register blocks. The Modbus master can ignore the
status change register and poll status data as it deems fit.
The Falcon has several terminals (connectors) for sensor
inputs. These sensor inputs can be configured for different
types of data input:
• 10K NTC dual temperature safety sensor
• 10K NTC single temperature non-safety sensor
• 12K NTC single temperature non-safety sensor
• 0-15 psi pressure sensor
• 0-50 psi pressure sensor
• 4-20 mA analog input
• Raw 0-4096 digital input
Each terminal is referenced by an “Sn” name (where “n” is a
number in the range of 1-10), and in some cases may be
identified by a functional name that describes its purpose (See
Table 3). A connector type parameter for each terminal
specifies how the data input is interpreted for the terminal.
Table 3. Sensor input names
2