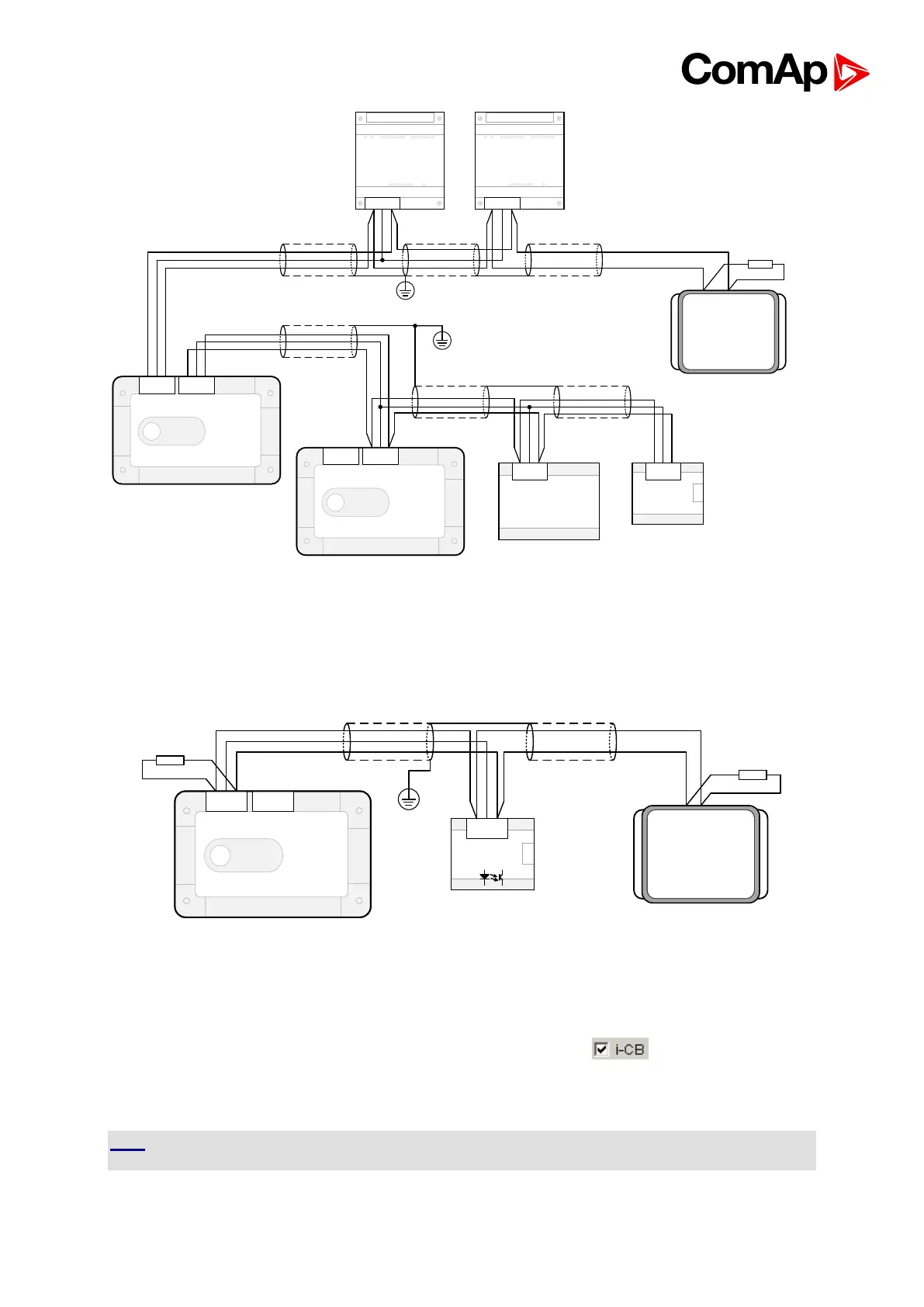
ECU communicating over the CAN bus is connected to CAN1 port of the controller and other
ComAp modules can be connected to this CAN bus as well. For detailed description of
connection of various ECUs refer to ComAp Electronic Engines Support manual.
11.4.1. I-CB wiring and configuration
1. Configure I-CB using I-CBEdit software. Configured I-CB behaves like fictive IS-AIN and
IS-BIN units. I-CB configuration associates selected values (from ECU database)
received from Engine Control Unit to selected CAN addressees (fictive IS-AIN, IS-BIN
inputs and outputs).
2. Configure corresponding controller CAN addresses and tick in PC configuration
tool.
3. Configure separate inputs and outputs in corresponding Analog, Binary inputs, outputs in
PC configuration tool.
HINT
In case of CAT engines, there is RS232 connection between I-CB and CCM.