4 — PROGRAMMABLE PARAMETERS
Curtis AC F4-A Motor Controller – August 2020 Return to TOC
pg. 114
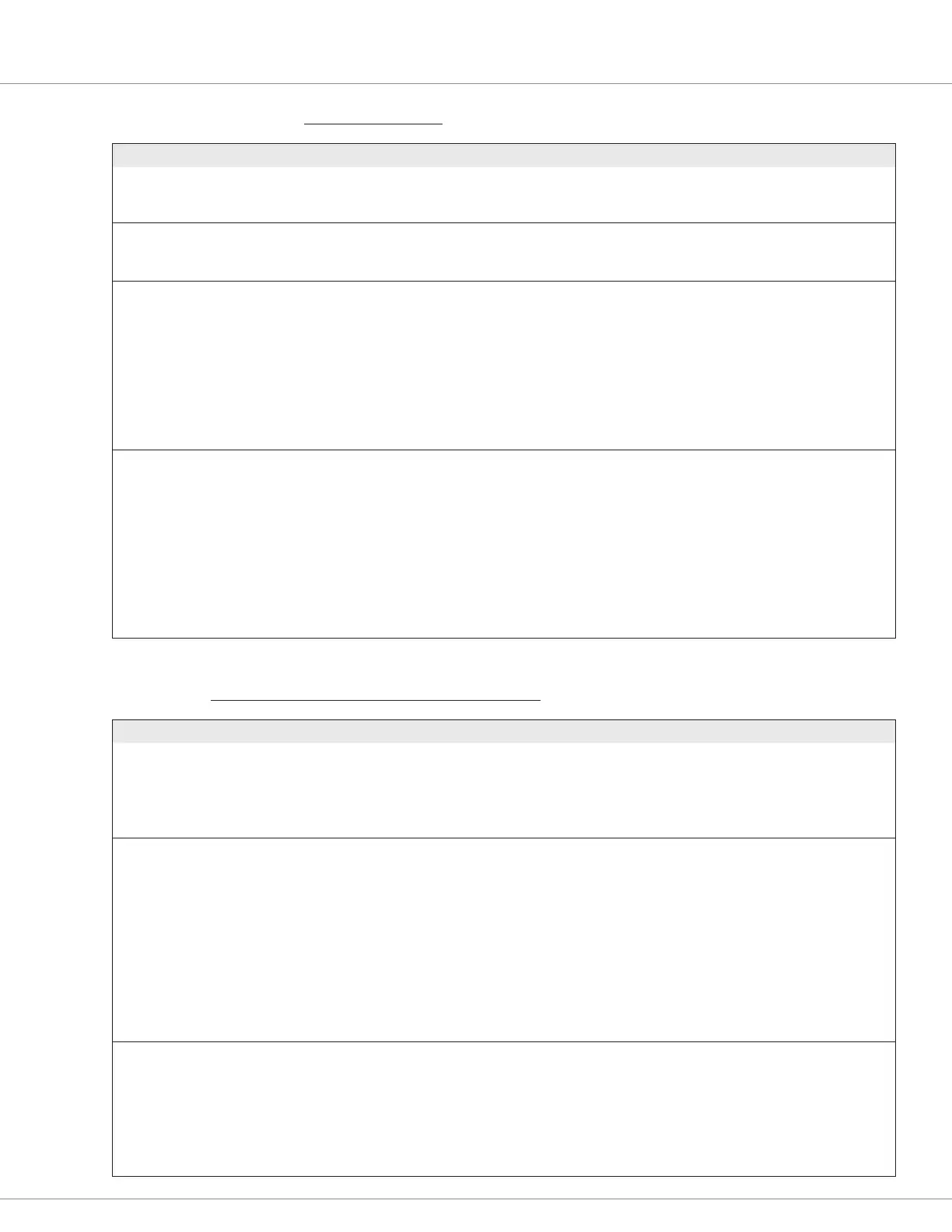
AC MOTOR SETUP — QUADRATURE ENCODER MENU
PARAMETER ALLOWABLE RANGE DEFAULT DESCRIPTION
5V Output Enable
Ext_5V_Output_Enable
0x36A8 0x00
On/Off
On/Off
On Enables the 5V Power Supply Output.
12V Output Enable
Ext_12V_Output_Enable
0x36A7 0x00
On/Off
On/Off
Off Enables the 12V Power Supply Output.
Encoder Steps
Encoder_Steps
0x34E7 0x00
32 – 2500
32 – 2500
64
[PCF]
Sets the number of encoder pulses per revolution. This must be
set to match the encoder; see motor nameplate.
Note: Do not change this parameter while the controller is
powering the motor. Changing this parameter always results in
a Parameter Change Fault (fault code 49). Clear it by cycling the
keyswitch (KSI cycle). The Parameter Change Fault protects the
controller and the operator.
Adjusting this parameter can be hazardous; setting it improperly
may cause vehicle malfunction including un-commanded drive.
Review the Commissioning Chapter when setting this parameter.
Swap Encoder Direction
Swap_Encoder_Direction
0x34EA 0x00
On/Off
On/Off
Off
[PCF]
Changes the motor encoder's effective direction of rotation.
The encoder provides data used to calculate motor position and
speed. This parameter must be set such that when the motor is
turning forward the controller reports a positive motor speed.
Positive motor speed must be in the forward direction in order for
the emergency reverse feature to operate properly.
Changing this parameter always results in a Parameter Change Fault
(fault code 49). Clear it by cycling the keyswitch (KSI cycle). The
Parameter Change Fault protects the controller and the operator.
Adjusting this parameter can be hazardous. Review the
Commissioning Chapter when setting this parameter.
AC MOTOR SETUP/QUADRATURE ENCODER — ENCODER FAULT SETUP MENU
PARAMETER ALLOWABLE RANGE DEFAULT DESCRIPTION
Fault Detection Enable
Encoder_Fault_Detection_
Enable
0x34E3 0x00
On/Off
On/Off
On Setting this parameter to On enables the encoder fault
checking. The three fault conditions checked are:
Encoder Fault (fault code 36).
Stall Detected (fault code 73).
Encoder Pulse Error (fault code 88).
Encoder Pulse Fault Detect
Time
Encoder_Pulse_Fault_Detect_
Time
0x34E5 0x00
0.0 – 30.0 s
0 – 94
0.5 sec Denes the minimum time it takes for the controller, while the
vehicle is in motion, to detect that the encoder and the Encoder
Steps parameter do not match. When the Encoder Steps setup is
incorrect, the motor controller cannot properly calculate the AC
motor eld orientation. The loss of eld orientation can cause the
motor to spin up toward full speed once any throttle is applied.
Applying the throttle and then releasing it, while the drive current
is signicant and the motor is still accelerating, sets this timer.
Note that the motor can spin to high rpms for several seconds
before conditions allow the controller to detect a fault.
The Encoder Pulse Error (fault code 88) is set when this fault occurs.
Setting the parameter to zero will disable this fault detection.
Fault Stall Time
Enc_Fault_Stall_Time
0x34E2 0x00
0 – 10 s
0 – 5000
5 sec When the controller detects no motor encoder movements (no
pulses), it sets this timer. If no motor encoder movement is
detected by the end of this period, with the maximum throttle
applied, it sets the Stall Detected fault (fault code 73).
For example, when driving up a ramp and the vehicle ‘stalls’
because it is under-powered or over loaded (driver applying full
throttle), or if driven into an immovable object, these types of
conditions will set this fault.
 Loading...
Loading...




