4 — PROGRAMMABLE PARAMETERS
Curtis AC F4-A Motor Controller – August 2020 Return to TOC
pg. 56
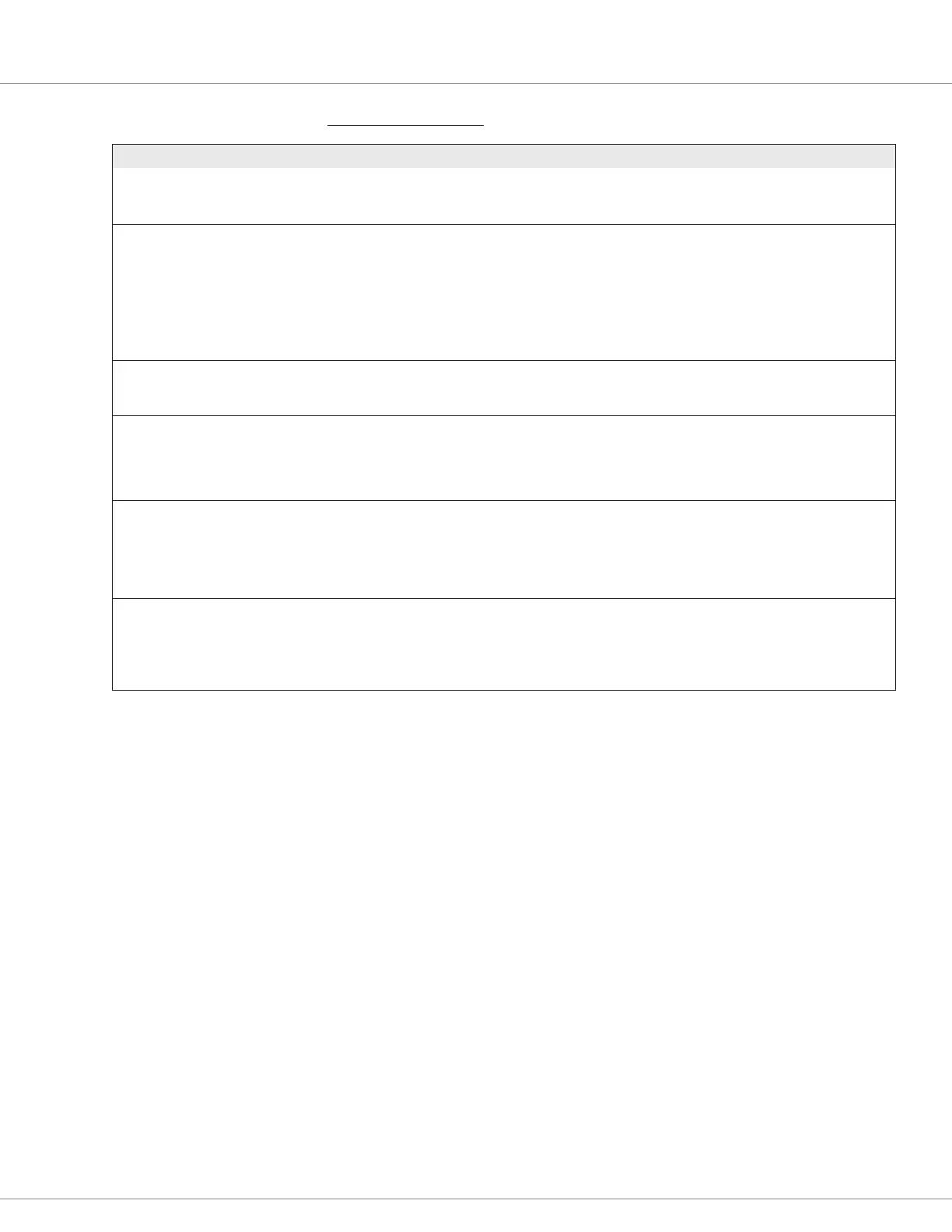
APPLICATION SETUP — CAN INTERFACE MENU
PARAMETER ALLOWABLE RANGE DEFAULT DESCRIPTION
CANopen Interlock
CANopen_Interlock_Enable
0x34B4 0x00
On/Off
On/Off
Off When programmed On CAN NMT State must = 5 (operational
state) in order for the interlock to be set.
Baud Rate
CAN_Baud_Rate
0x2001 0x01
–1 – 4
–1 – 4
0 Sets the CAN baud rate for the CANopen Ancillary system:
–1 = 100Kbps
0 = 125Kbps
1 = 250Kbps
2 = 500Kbps
3 = 800Kbps
4 = 1000Kbps.
Heartbeat Rate
CANopen_Heart_Beat_Rate
0x1017 0x00
16 – 2000 ms
0 – 2000
100 ms Sets the transmission rate of the CAN heartbeat messages from
the CANopen Ancillary system.
Emergency Message Rate
CAN_Open_Emergency_Inhibit_
Time
0x1015 0x00
0 – 6554 ms
0 – 65535
16 ms Sets the minimum transmission rate of the CAN Emergency
Messages from the CANopen Ancillary system. This prevents
quickly changing fault states from generating so many
emergency messages that they ood the CANbus. The step size
is 10 ms.
CAN NMT State
CAN_NMT_State
0x32A4 0x00
0 – 127
0 – 127
Read Only Controller CAN NMT state:
0 = initialization
4 = stopped
5 = operational
127= pre-operational
CAN Node ID
Can_Node_Id
0x2000 0x01
0001 – FFFFh
1 – 65535
0026h
(0x26)
(38d)
Displays the controller’s Node ID, in hexadecimal.
For example: 0x26 = 38d
Do not assign 0x00 as a device’s CAN Node ID. Such an ID will
never be detected by CIT or the 1313 HHP, and therefore be
inoperable.
CAN ports 1 and 2
Use CAN1 for the secure node connection to the Curtis programming tools (see Appendix D).
This is the primary CAN port. The secondary CAN port (CAN2) is intended as the option of
separating the programming and diagnostic operations from the run-time vehicle/application level
communications. Set the CAN1 and CAN2 Parameters with the same CAN Index to the same value.
Set each CAN port to a dierent Node ID.
Non-isolated CAN models
CAN1 has the internal 120Ω termination when pins 21 and 34 are connected. CAN2 does not have
the internal 120Ω termination. For applications requiring CAN2 termination, add it externally from
the controller. On these models, the CAN-circuit reference is from the controllers I/O ground (pins
7 and 18).
CAN1
CAN1 L = pin 35
CAN1 H = pin 23
CAN1 120-Ohm termination: externally connect (short) pins 21 and 34.
CAN2
CAN2 L = pin 29
CAN2 H = pin 28
 Loading...
Loading...




