Commissioning with the FF configuration program Cerabar M, Deltabar M, Deltapilot M
162 Endress+Hauser
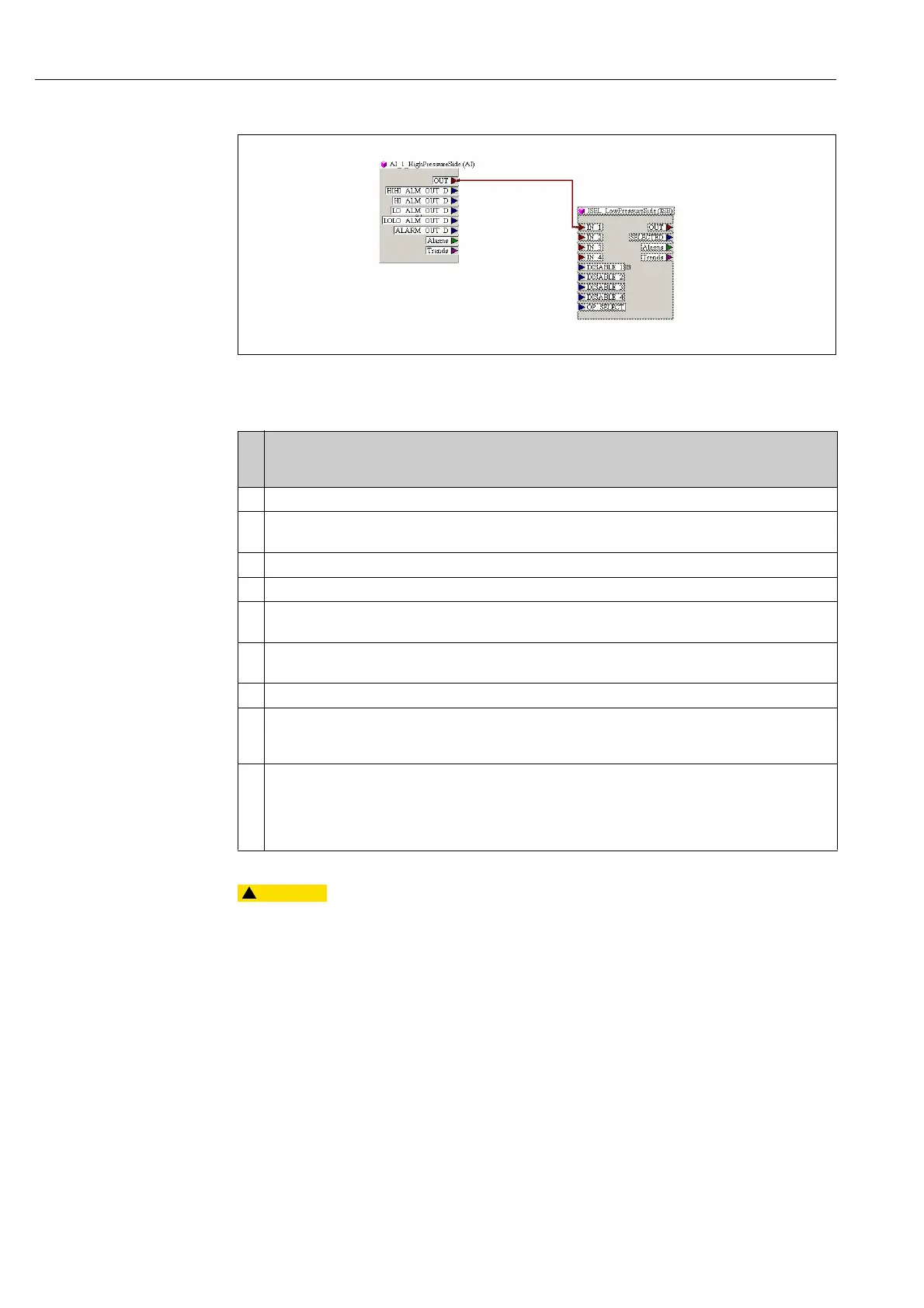
A0030416
3.)
Note Dependencies when setting parameters!
‣ It is not permitted to reverse the assignment of the measuring points to the direction of
communication.
‣ The measured value of the transmitting device must always be greater than the
measured value of the receiving device (via the "Electr. delta P" function).
‣ Adjustments that result in an offset of the pressure values (e.g. position adjustment,
trim) must always be performed in accordance with the individual sensor and its
orientation, irrespective of the "Electr. Delta P" application. Other settings result in non-
permitted use of the "Electr. Delta P" function and can lead to incorrect measured values.
Description
Adjustment of the Cerabar M/Deltapilot M on the low-pressure side (the differential is generated in
this device) in the Pressure Transducer Block
1 Open the Pressure Transducer Block and set the block mode to OOS.
2 Select the "Pressure" measuring mode via the Measuring mode/OPERATING_MODE or Primary Value Type/
PRIMARY_VALUE_TYPE parameter.
3 Select a pressure unit via the Calibration Units/CAL_UNIT parameter, here "mbar" for example.
4 The Cerabar M/Deltapilot M is unpressurized, perform position adjustment, see ä 73.
5 Select the input via the E.delta p selec./E_DELTA_P_INPUT_SELECTOR parameter (here Input1 for
example).
6 Select the desired unit via the E.delta p unit/E_DELTA_P_INPUT_UNIT parameter (here mbar for
example).
7 Select the external value mode via the Electr. delta P/ELECTRIC_DELTA_P_CONTROL parameter.
8 The current measured values and status information returned by the device on the high-pressure side can
be read via the E. delta p value/E_DELTA_P_VALUE and "E. delta p status/E_DELTA_P_STATUS"
parameters.
9 Set the Pressure Transducer Block to the "Auto" block mode. If necessary, configure the
Channel/CHANNEL ( ä 211),
Linearization Type/L_TYPE ( ä 212),
Transducer Scale/XD_SCALE ( ä 210) and
Output Scale/OUT_SCALE ( ä 211) parameters by means of the Analog Input Block.