6. MAINTENANCE, TROUBLESHOOTING
6-8
6.8 Fallback Arrangements
If the top priority sensor (for example GPS1) cannot be used, this equipment automat-
ically uses the second priority sensor (for example, GPS2) when multiple sensors
(GPS1 and GPS2 for example) are installed. When there is no fallback sensor avail-
able, each function is limited as follows:
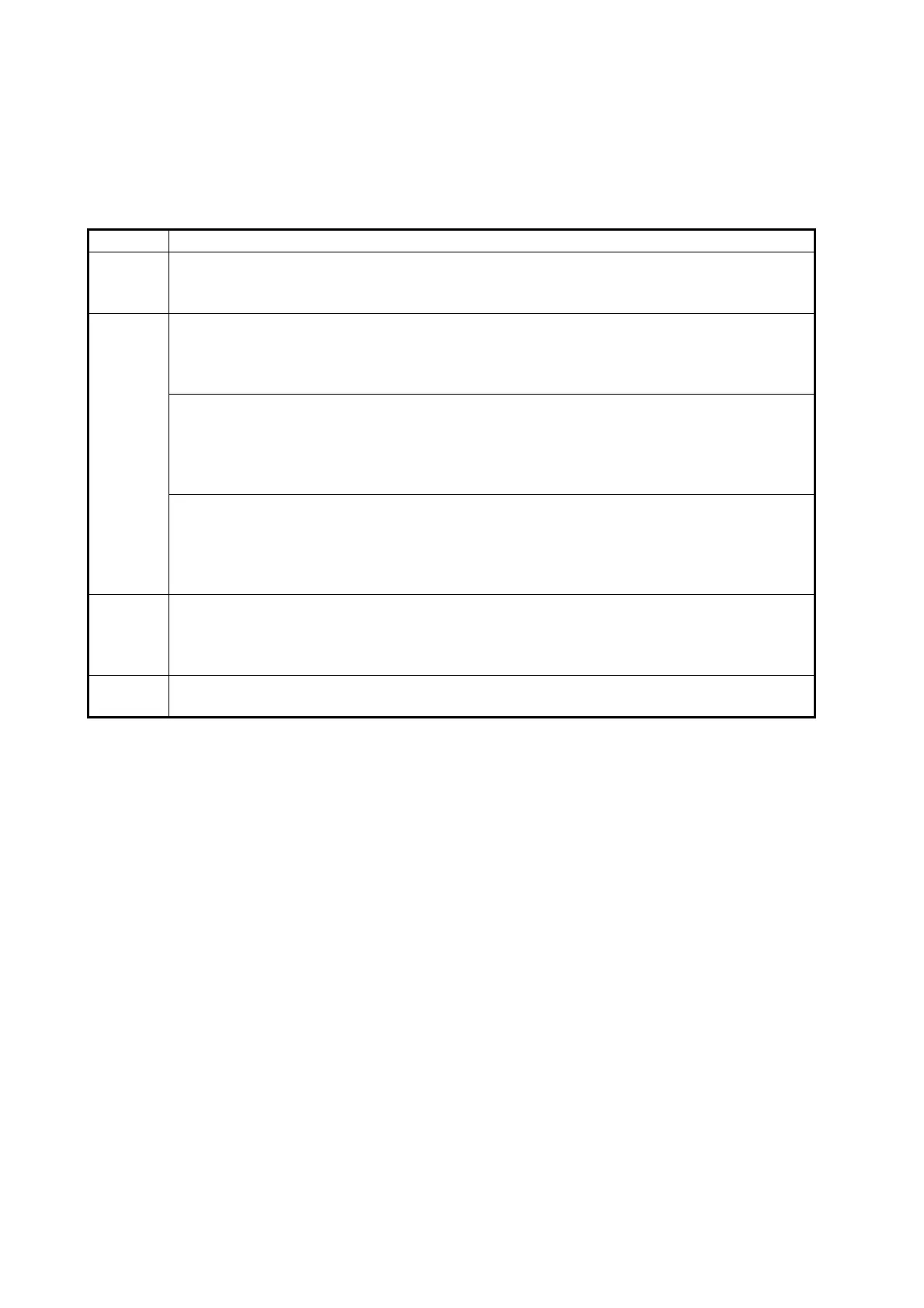
Sensor Function limitations
Heading
sensor
• The [HDG] indication reads "***.*°"
• The orientation mode is automatically set to [HEAD-UP].
• TT, AIS, radar map and echo averaging are disabled.
Speed
sensor
When [LOG(WT)] is selected:
• The sensor used is automatically switched in the following priority order: GPS(BT) >
LOG(BT).
• The SPD indication reads "***.* kn" when both GPS(BT) and LOG(BT) cannot be used.
When [LOG(BT)] is selected:
• The sensor used is automatically switched in the following priority order: GPS(BT) >
LOG(WT).
• The SPD indication reads "***.* kn" when both GPS(BT) and LOG(WT) cannot be
used.
When [GPS(BT)] is selected:
• The sensor used is automatically switched in the following priority order: LOG(BT) >
LOG(WT).
• The SPD indication reads "***.* kn" when both LOG(BT) and LOG(WT) cannot be
used.
COG/
SOG
sensor
• When the GPS sensor cannot be used, the values of COG and SOG are calculated
from HDG and LOG(BT).
• Additionally when the heading sensor cannot be used, the values of SOG is calculated
from LOG(BT). The COG indication reads "***.*°".
Position
sensor
• The POSN indication reads all asterisks.
• AIS and radar map are disabled.