DMC-1000 Chapter 2 Getting Started • 15
signal CHA and CHB. If, on the other hand, you are using a
differential encoder, interchange only CHA+ and CHA-. The loop
polarity and encoder polarity can also be affected through software
with the MT, and CE commands. For more details on the MT
command or the CE command, see the Command Reference section.
Note: Reversing the Direction of Motion
If the feedback polarity is correct but the direction of motion is
opposite to the desired direction of motion, reverse the motor leads
AND the encoder signals.
When the position loop has been closed with the correct polarity, the next step is to adjust the PID
filter parameters, KP, KD and KI. It is necessary to accurately tune your servo system to ensure
fidelity of position and minimize motion oscillation as described in the next section.
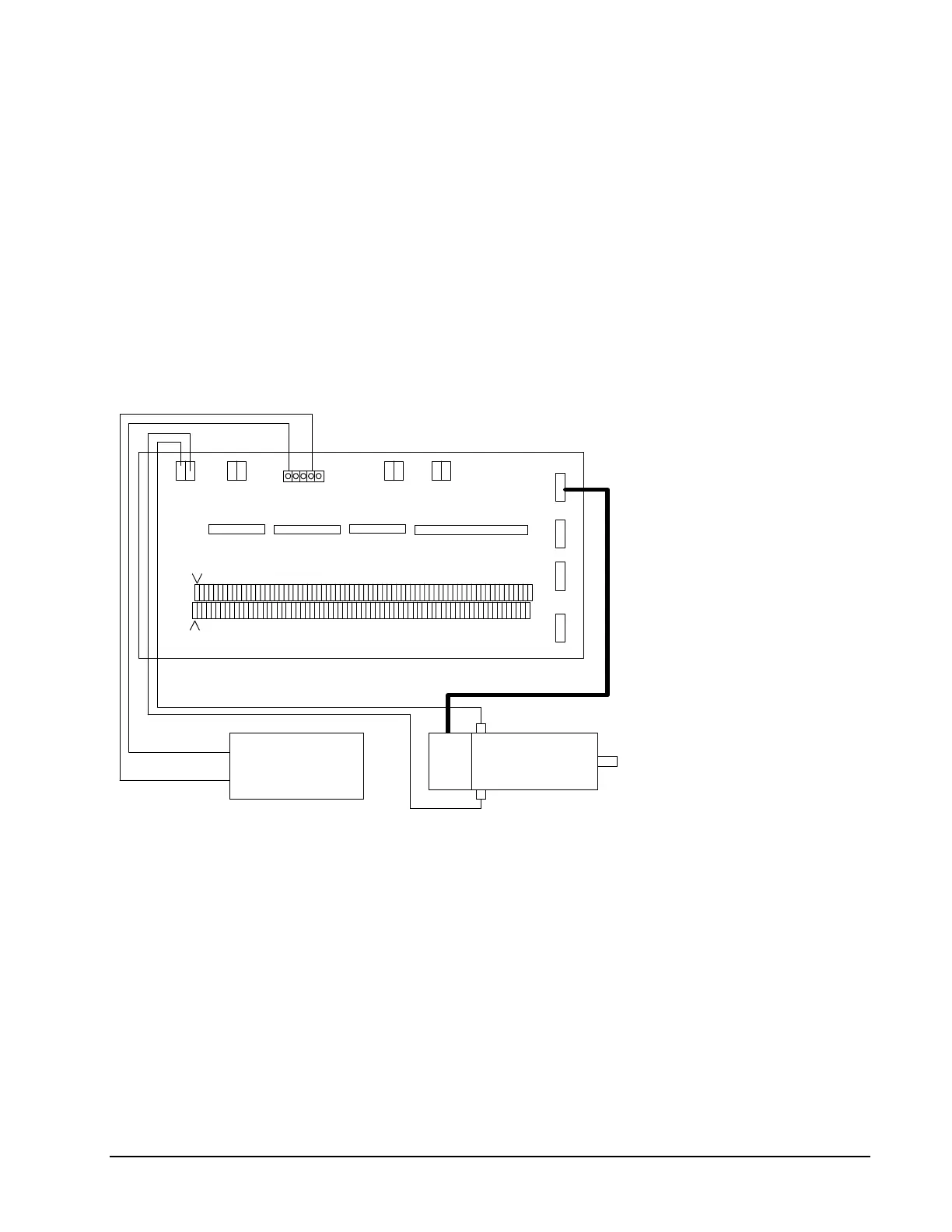
W Encoder Z Encoder Y Encoder X Encoder
Pin 1
Pin 2
Screw Terminals
+
(Typically Red Connector)
red wire
black wire
+
-
CPS Power Supply
Encoder Ribbon Cable
ICM-1100
J2
J3
J5
J4
Galil
DC Servo Motor
-
(Typically Black Connector)
Encoder
Figure 2-2 - System Connections with the AMP-1100Amplifier. Note: this figure shows a Galil Motor and
Encoder which uses a flat ribbon cable to connect to the AMP-1100 unit.
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com