DMC-21x3 Accessories Chapter 10 AMP-20542• 65
Brush Amplifier Operation
The AMP-20542 also allows brush servo operation. To configure an axis for brush-type
operation, connect the 2 motor leads to Phase A and Phase B connections for the axis. Connect
the encoders, homes, and limits as required. Set the controller into brush-axis operation by
issuing the BR command (BRn,n,n,n). By setting n=1, the controller will operate in brush mode
on that axis. For example, BR0,1,0,0 sets the Y-axis as brush-type, all others as brushless. If an
axis is set to brush-type, the amplifier has no need for the Hall inputs. These inputs can
subsequently be used as general-use inputs, queried with the QH command. The gain settings
for the amplifier are identical to the brushless operation.
Using External Amplifiers
The AMP-20542 breaks out the step/direction or amplifier enable/motor command signals to
control an external servo or stepper amplifier. For example, a machine might have two axes
(XY) that use the AMP-20542, one axis that uses an external stepper amplifier (Z), and another
that uses an external servo amplifier (W). The pulse and direction signals for an external step
drive are accessed through the high density 44-pin D-sub connector, as are the amplifier enable
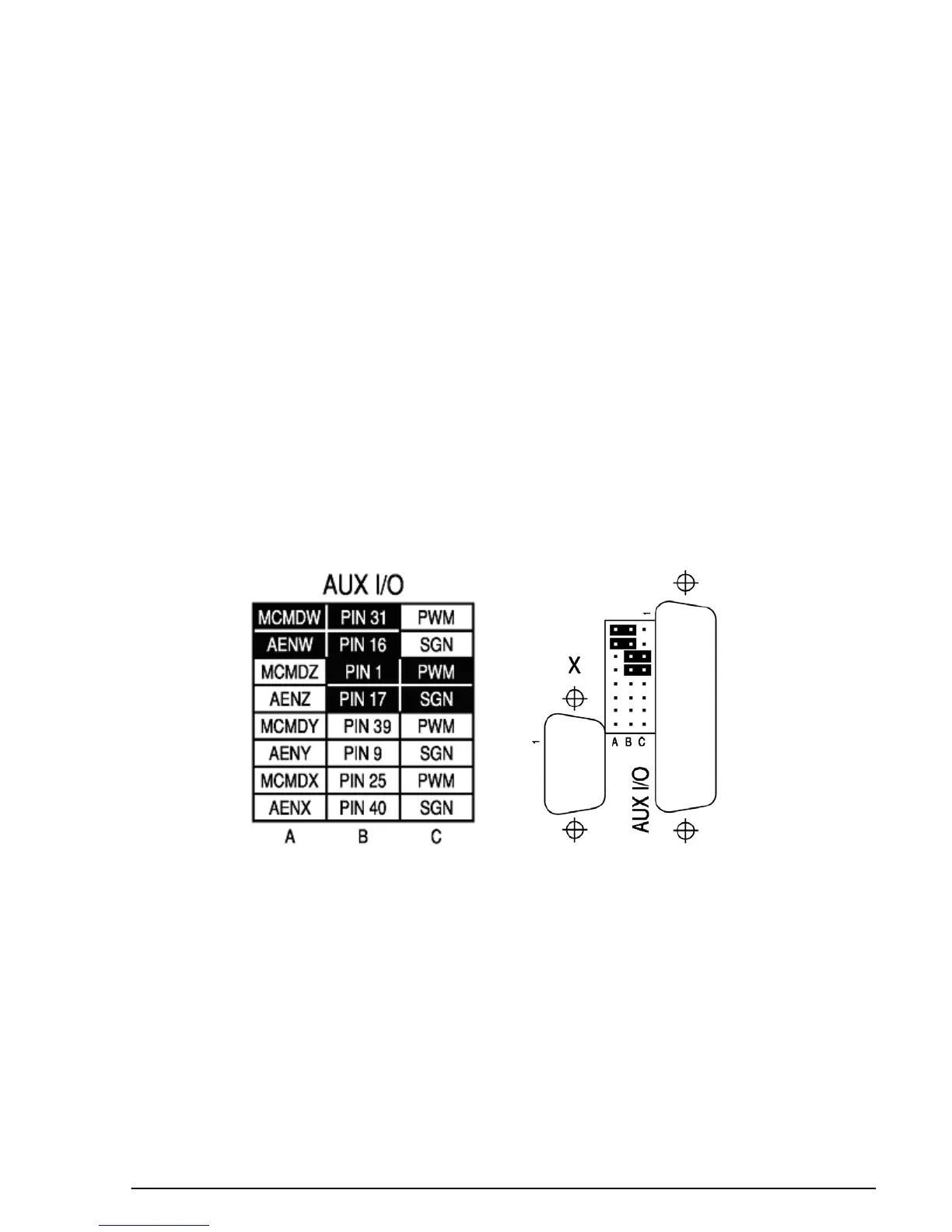
and motor command line for an external servo amplifier. To configure which signals are
brought out, jumpers are used between connectors J3 and J4 (see figure below). If no jumpers
are installed (factory default), the corresponding pins on the 44-pin connector will be
unconnected. In the following example, the W axis will output the motor command on pin 31
and amplifier enable on pin 16. The Z axis will output PWM (Step) on pin 1 and Sign
(Direction) on pin 17 of the 44-pin connector.
Figure 31 The W-axis is configured for an external servo amplifier and Z for an external stepper amplifier
Error Monitoring and Protection
The amplifier is protected against over-voltage, under-voltage, and over-current for brush and
brushless operation. The controller will also monitor for illegal Hall states (000 or 111 with
120° phasing). The controller will monitor the error conditions and respond as programmed in
the application. The errors are monitored via the TA command. TA n may be used to monitor
the errors with n = 0, 1, 2, or 3. The command will return an eight bit number representing
specific conditions. TA0 will return errors with regard to under voltage, over voltage, and over
current. TA1 will return hall errors on the appropriate axes, TA2 will monitor if the amplifier

 Loading...
Loading...
