Page 37 of 49 S1024.mz-32-V2.1-EN
Telemetry
RX Selection
The telemetry connection between the transmitter and receiver takes place
via the return channel of the HoTT receiver defined as the main receiver. If
more than one receiver is bound to a model memory, the return channel
will be by default the last bound receiver. This assignment can be changed
in the submenu “RF Set” in the base menu or at the special “Telemetry”
menu.
Depending on the setting of the value field at the “Tele. Cycle” the
transmission of telemetry data takes place after each fourth data packet.
This also influences the reaction time to control inputs when making setting
changes at the ASCII menu when setting up for example a flight controller
using the wireless interface. The corresponding delay does not constitute an
error.
Note
Sensors must always be connected to the main receiver, since only the
return channel of this receiver is evaluated by the transmitter.
Attention
Programming on the model or on sensors must not be carried out during
ongoing model operation and only when the engine/motor is switched off!
Up to four receivers can be bound to each model memory in the submenu
“RF Set”. However, a telemetry connection can only be established to one
of these four receivers. The standard telemetry receiver is always the last
one bound.
All sensors are to be connected to the receiver that is designated as the
receiver from which we expect to receive telemetry information. This is
important in a multi receiver configuration and therefore will require proper
planning as to the location of the receiver which should be close to where
the telemetry sensors are installed.
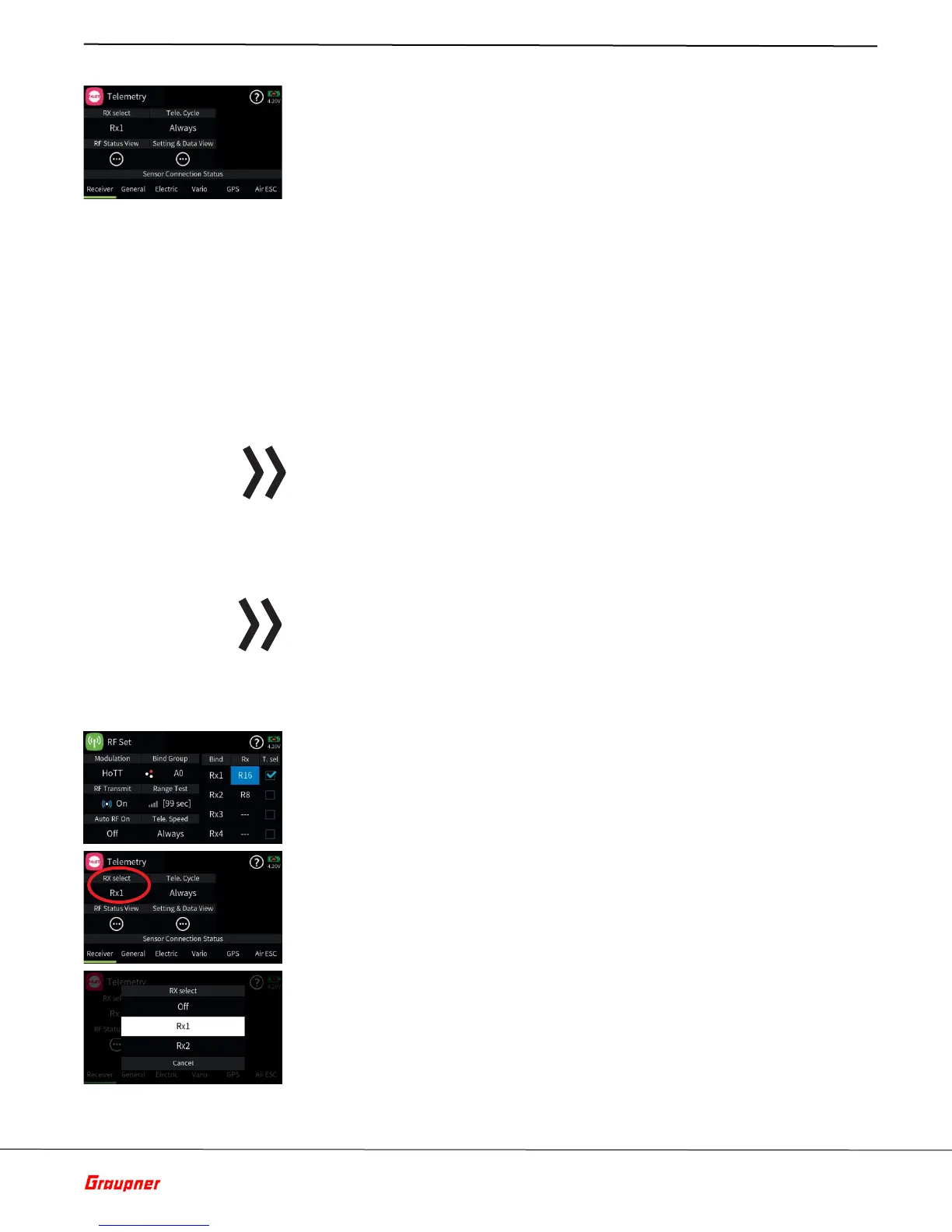
In the “RF Set” menu the receiver that has the “T.Sel” field checked is the
receiver that provides telemetric information to the transmitter
Viewing telemetric information or settings from additional receivers bound
to the model can be done by tapping on the “RX Select” field which will show
a list with all active receivers to pick from.

 Loading...
Loading...




