Chapter 6 Trial run
45
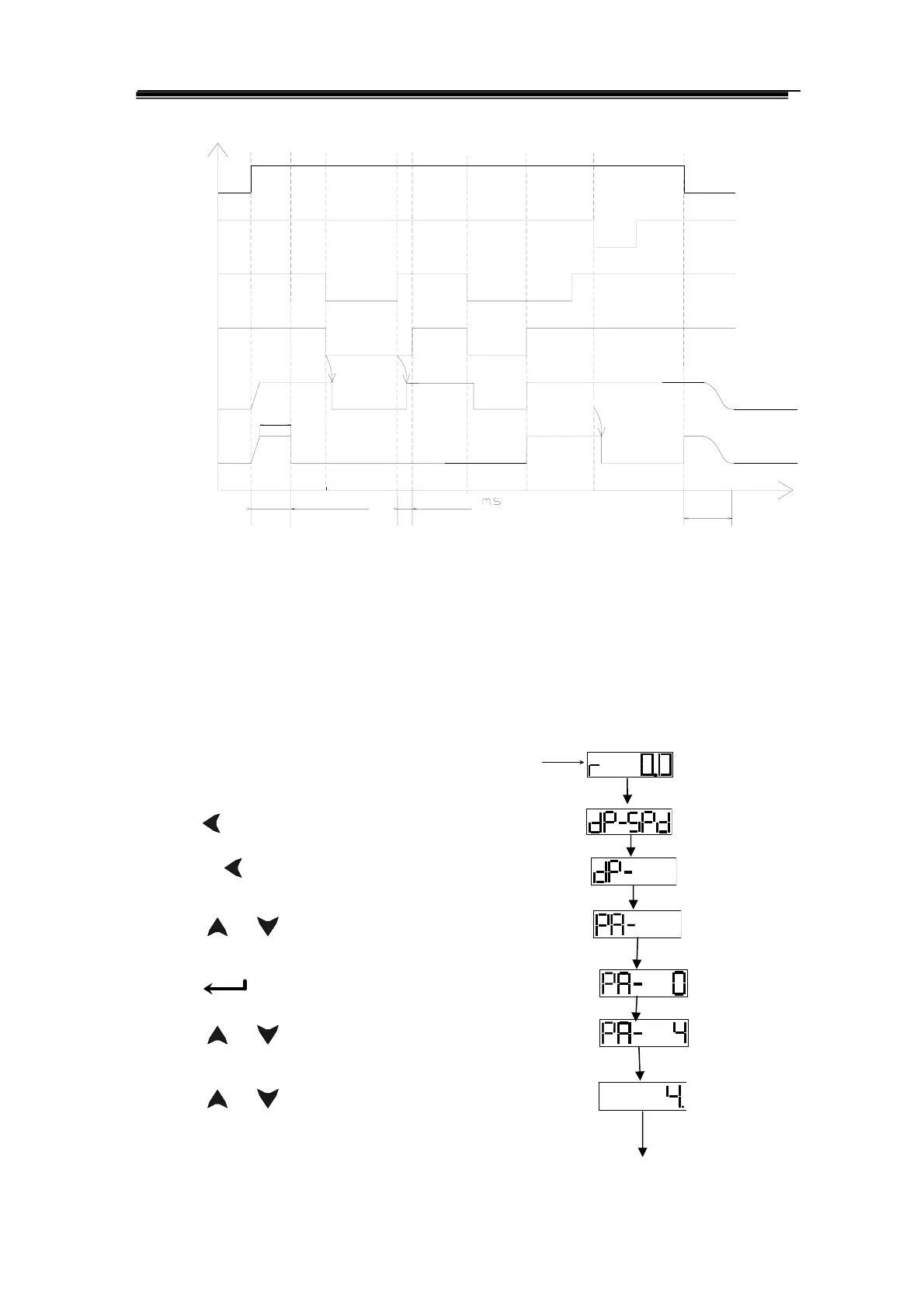
OFF ON OFF ON OFF
t<600us
power off
power off
power on
power on
power off
OFFOFF ON ON OFF
t= PA52×4
<600ms
power on
Power
supply
SRDY
ALM
SON
ALRS
power down
alarm on
reset
power on detection
800ms
t<300us
t<1ms
Motor
activated
6.2.2 JOG running
Do switch off load prior to JOG running. If the JOG running is well done, it means that the
connection between the motor and the servo unit is correct.
Steps:
Connect CN1 for the control signal : OFF for servo enabling, ON for CCW drive ⑴
stop(FSTP), ON for CW drive stop(RSTP).
Power on for servo unit and the initial display is:⑵
Press‘⑶
’key, it displays:
Repress‘⑷
’key to back to the first layer menu, it displays
Press ‘⑸
’or ‘ ’key to find the parameter setting menu
Press‘⑹
’key, it displays
Press ‘⑺
’or ‘ ’key to find the No.4 parameter (others)
Press ‘⑻ ’or ‘ ’key to set No.4 parameter to 4, it displays