Chapter 6 Trial run
49
1) Input the control signal by connecting CN1: OFF for servo on(SON), OFF for speed
choose1 (SC1), speed choose2 (SC2), ON for CCW drive stop (FSTP), ON for CW
drive stop (RSTP).
2) Switch on the power supply of the control circuit, the servo unit displayer will light.
Check connection if alarming occurs.
3) Set the control mode selection(parameter PA04) for speed running mode(set for 2), set
the speed parameters PA24~PA27 as required.
4) Set servo on(SON) for ON, the motor will be activated for internal speed running state.
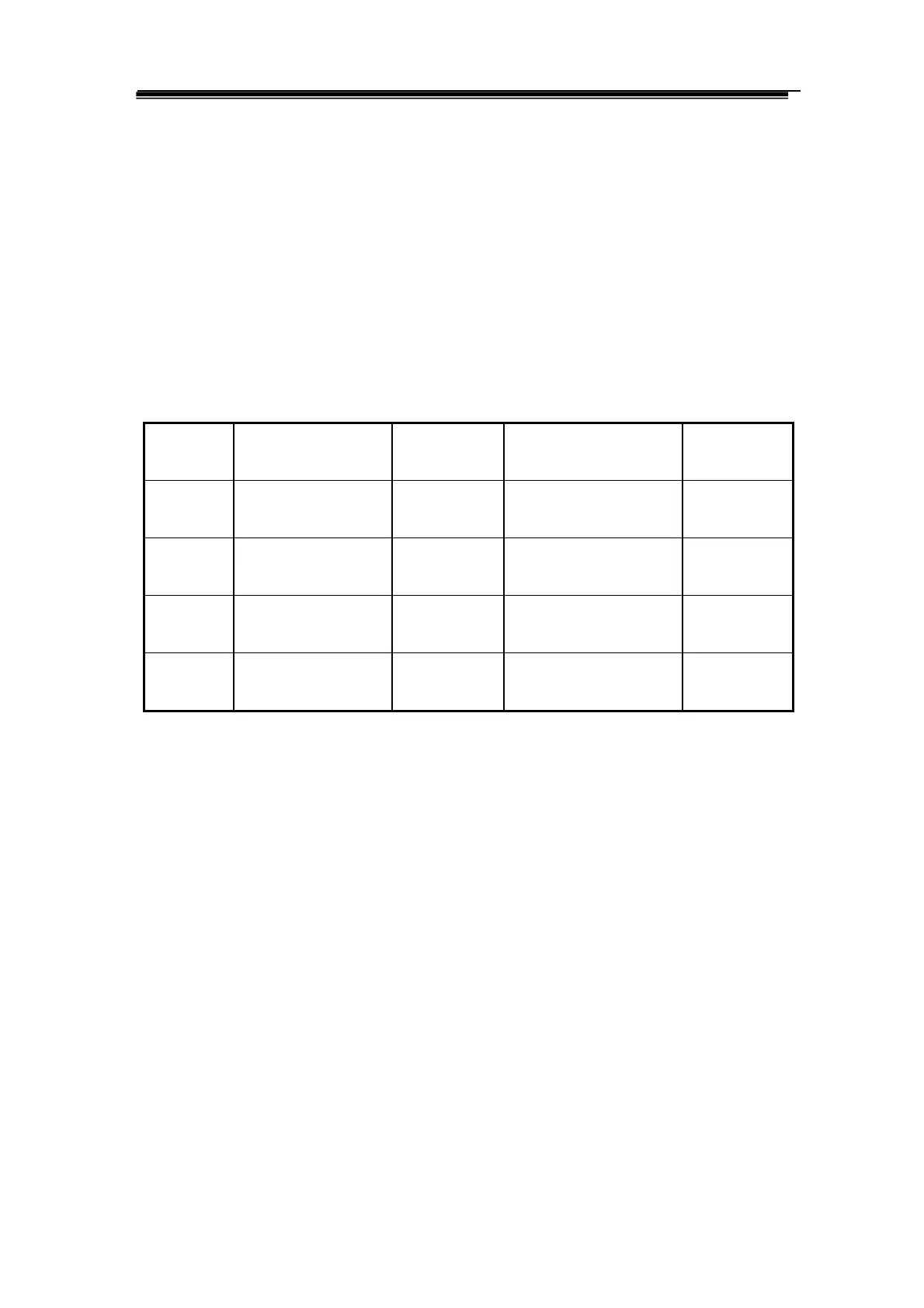
5) Change the states of input signal SC1, SC2 for different combinations of internal speed,
which is shown as following table:
SC1
SC2
I n t e r n a l s p e e d Parameter Setting range Unit
0
0
1 PA24
-30000~+30000
0.1rpm
0
1
2 PA25
-30000~+30000
0.1rpm
1
0
3 PA26
-30000~+30000
0.1rpm
1
1
4 PA27
-30000~+30000
0.1rpm
6.2.5 Orientation control run
1) Input the control signal by the Fig.6.4 wiring diagram block: OFF for servo on(SON),
ON for CCW drive stop (FSTP), ON for CW drive stop (RSTP).
2) Switch on the power and adjust the parameters, set appropriate electronic gear ratio
(PA12, PA13).
The so-called ‘electronic gear function’ is a function that compared to the mechanical
gear, the motor moving that is equivalent to the input instruction pulse can be set for any
value by the adjustment of servo parameters without considering the mechanical
reduction ratio and encoder pulses in controlling. By the setting of PA12, PA13
parameters, it is easy for user to match with various pulse resources to get the desirable
control resolution (i.e. angle/pulse).
The formula for electronic gear ratio is as follows:
4××=× CNGP
P:pulse amount of input instruction;