63
/
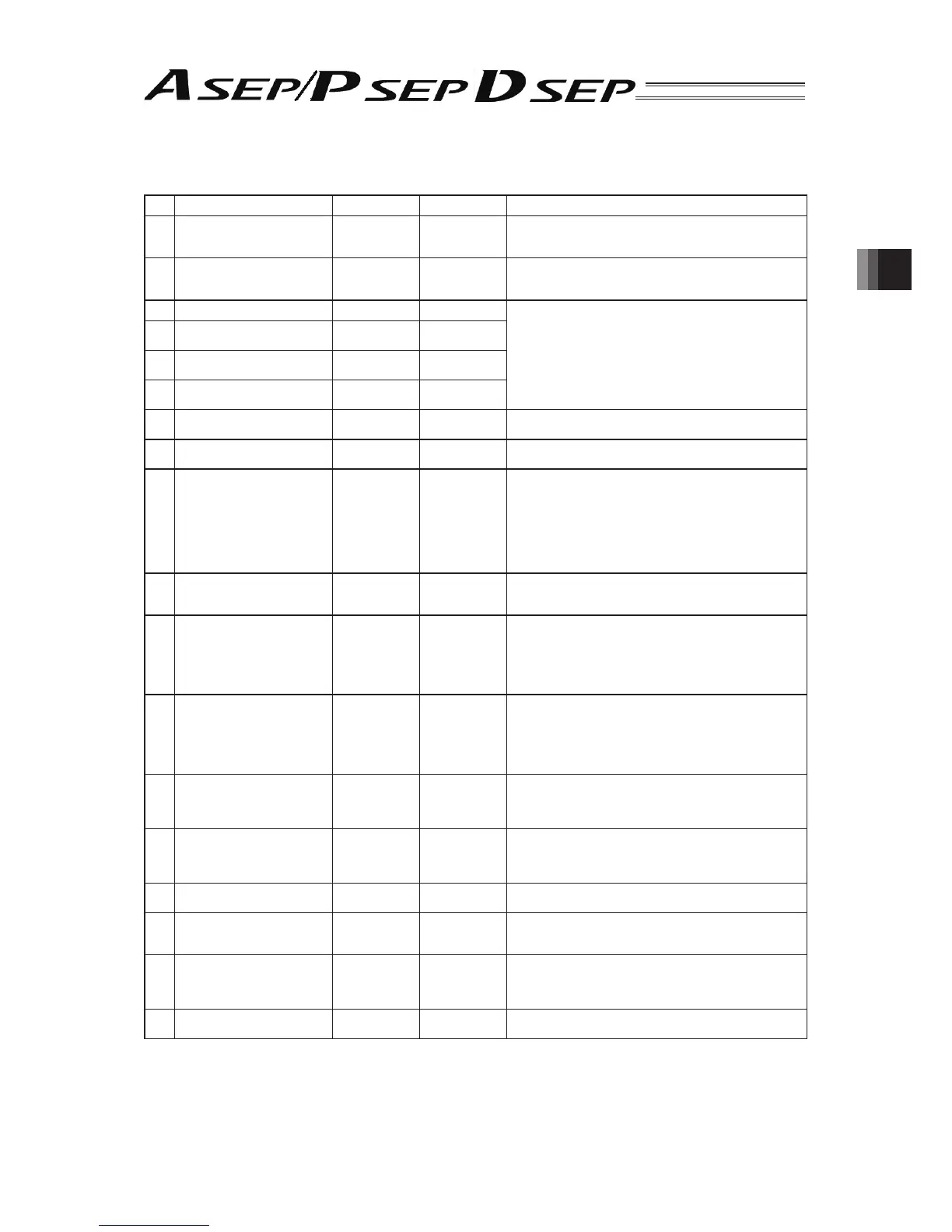
3. Operation
3.4 User Parameters
No Name Initial Value Setting Range Remarks
1
Positioning Width [mm]
Dependent on
Actuator
0.01 to
Dependent on
Actuator
Set the output range of LS signal and PE signal toward the
target position.
2
Jog Speed [mm/sec]
Dependent on
Actuator
0.01 to
Dependent on
Actuator
Set the movement speed in using the jog.
3
Servo-Motor Gain No. 6 0 to 31
These items are set to the standards when the machine is
delivered.
(Note 1)
[Refer to 3.5]
4
Torque Filter Time Constant
Dependent on
Actuator
0 to 2500
5
Velocity Loop Proportional
Gain
Dependent on
Actuator
1 to 27661
6
Velocity Loop Integrated Gain
Dependent on
Actuator
1 to 217270
7
Pressing Speed
[mm/sec]
Dependent on
Actuator
1 to Dependent
on Actuator
Set the velocity in the pressing operation.
8
Pressing Stop Judgment Time
[msec]
255 0 to 9999
Set the time period from hitting the work in the pressing
operation to judged operation completion.
9
Current Limitation in Pressing
and Bridging
[0:
Current limitation value while
moving (ASEP, DSEP),
Current limitation value while
in operation stop (PSEP)
1: Current limitation value
while pressing]
0 0 to 1
Set the torque after the actuator reaches the target position
without hitting the work in the pressing operation in midway.
* If set to 0, the current limitation value is different for
ASEP/DSEP and PSEP.
10
Auto Servo-motor OFF Delay
Time [sec]
1 0 to 9999
In the case that the energy-saving function is enabled, set
the time period from positioning completion to automatic
servo-motor turning OFF.
11
Stop Mode Selection
[0: Complete Shutdown
/1: Servo-Motor Stop]
0 0 to 1
It is effective only for PSEP.
When “0” is selected, the current position is retained with
the torque set with Parameter No.12, after the positioning
operation.
When “1” is selected, the current position is retained with
the servo-motor control.
12
Current Limit Value in
Positioning Stop [%]
35 0 to 70
It is effective only for PSEP.
It is enabled when the Parameter No.11 is set to “0”.
When the value is increased, the stop holding torque is
increased. In the case that a great external force is given
when the actuator is stopped and knocking is caused,
increase the value.
13
Current Limit Value in Home
Return [%]
Dependent on
Actuator
0 to 100
In the case that a sliding resistance is increased due to
the load conditions, etc., in the vertical use, and the home
return operation is completed at the position before the
specifi ed position, increase the value.
14
Automatic Positioning
Execution Waiting Time [sec]
0.01 0.01 to 60.000
It is enabled when the PIO Pattern is set to “5”.
Set the duration after reaching the target position and
before the movement starts toward the next target when
the automatic operation signal (ASTR) is on.
15
Soft Limit [mm]
Dependent on
Actuator
0.01 to
9999.99
Set the effective stroke range.
16
Home Return Offset Level
[mm]
Dependent on
Actuator
0.00 to
Dependent on
Actuator
It is changed when the fi ne adjustment is to be performed
for the home position.
17
Home Return Direction
[0: Reverse/1: Normal]
Dependent on
Actuator
0 to 1
“Normal” shows the motor side and “Reverse” shows the
opposite side of the motor.
* For the rod type, the home return direction can not be
changed.
18
Simplifi ed Absolute Function
[0: Disable/1: Enable]
Dependent on
Actuator
0 to 1
In the case that the absolute function is disabled for the
simplifi ed absolute unit, set it to “0”.

 Loading...
Loading...









