68
/
3. Operation
3.5.3 Servo Parameter
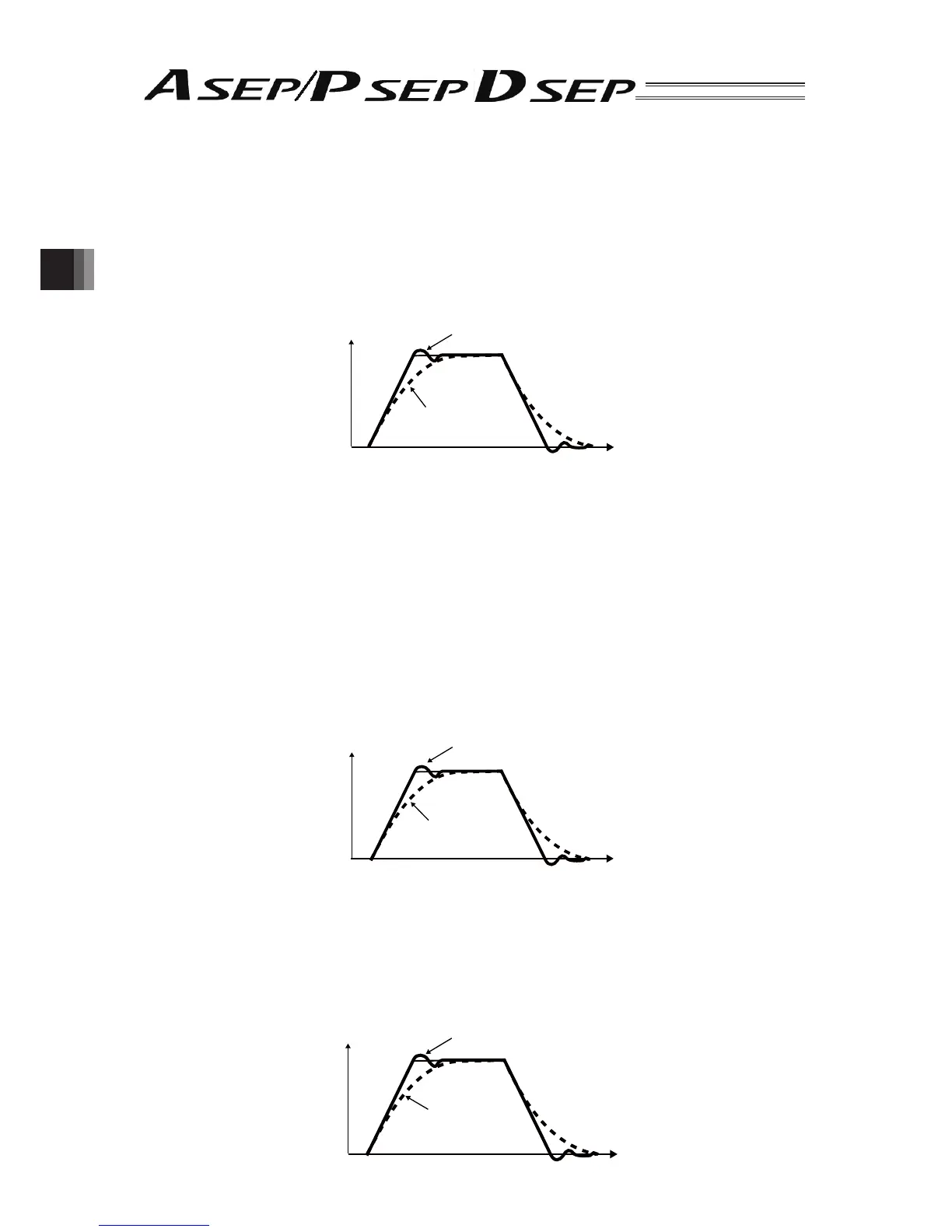
• User Parameter No. 3 Servo-Motor Gain Number
This parameter decides the responsibility to the position control loop.
When the set value is increased, the follow-up ability to the position command becomes better.
However, if the value is too large, an overshoot is caused easily. When the set value is too low,
the follow-up ability to the position command is degraded and it takes longer time to complete the
positioning.
Velocity
When the set value is high: (overshoot)
When the set value is low:
Time
• User Parameter No. 4 Torque Filter Time Constant
This parameter decides the fi lter time constant for the torque command. In the case that the
machine’s resonance frequency is the same as or lower than the servo-motor loop response
frequency, the motor causes a vibration. When the set value is increased, this mechanical
resonance can be controlled.
However, when this value is increased too much, the stability in the control system might be
damaged.
• User Parameter No. 5 Velocity Loop Proportional Gain
This parameter decides the responsibility to the velocity control loop.
When the set value is increased, the follow-up ability to the velocity command becomes better (the
servo-motor rigidity is enhanced).
As the load inertia is larger, increase the set value. However, if the set value is increased too much,
an over-chute or oscillation is caused, which might easily cause a vibration in the mechanical
system.
Velocity
When the set value is high: (overshoot)
When the set value is low:
Time
• User Parameter No. 6 Velocity Loop Integrated Gain
This parameter decides the responsibility to the velocity control loop.
Having a bigger setting value enables higher response ability to the speed command. Also,
repulsion to the load fl uctuation becomes higher.
If the setting value is too large, it may cause overshooting or generates vibration and makes the
mechanical system easy to generate vibration.
When the set value is too low, the follow-up ability to the position command is degraded and it
takes longer time to complete the positioning.
Velocity
When the set value is low: (overshoot)
When the set value is high:
Time