94
9. Maintenance and Inspection
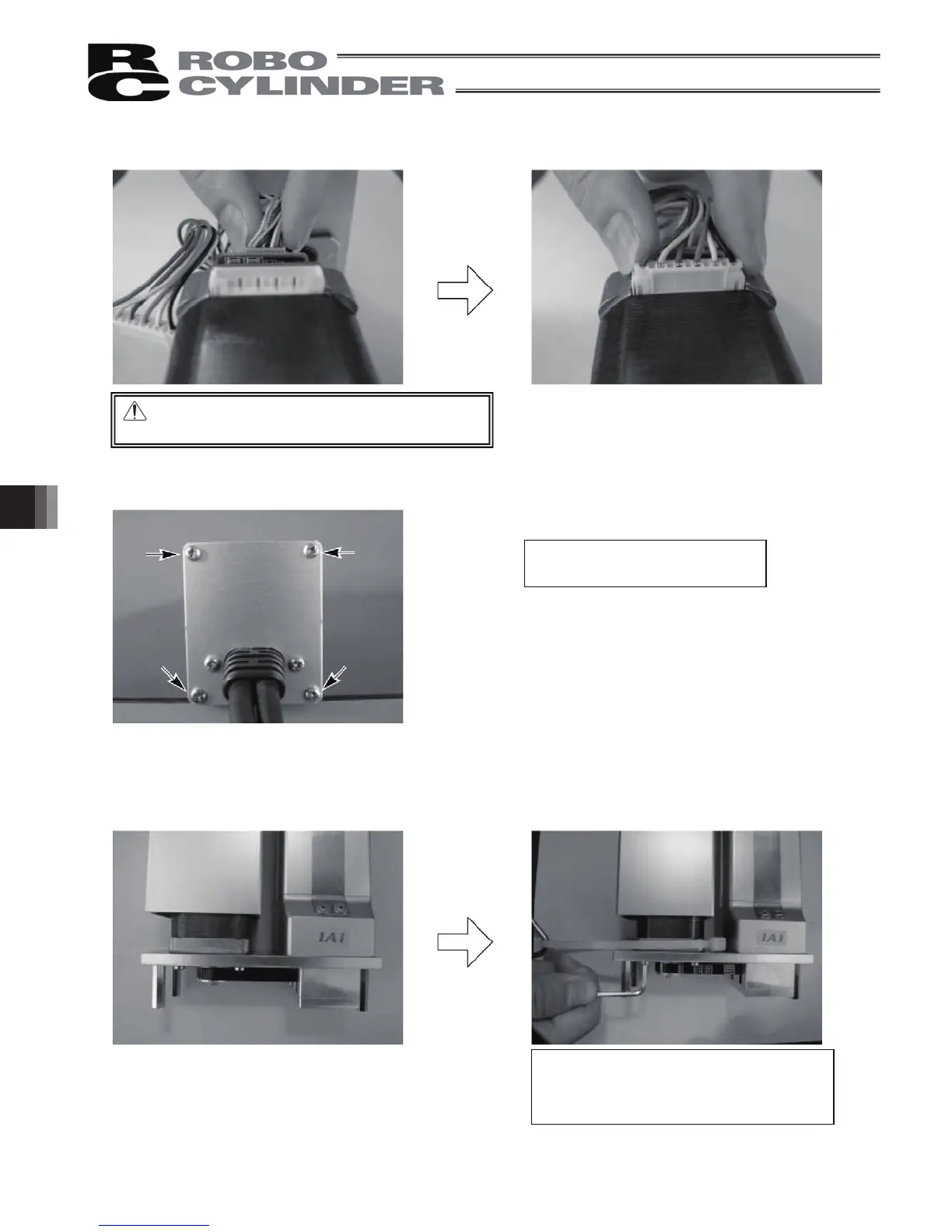
8) Connect the encoder connector and motor connector to a new motor.
• Connection of the encoder connector • Connection of the motor connector
9) Couple the motor cover to the motor end cap with the affixing pan-head screws
(M3 × 6, 4 pcs.). At this time, make sure not to pinch the cables.
10) Temporarily tighten the motor with the tension adjusting bolts (hexagon socket-head screws: M3 × 10, 4
pcs.) and loop the belt. In this condition, pass a looped strong string (or long tie-band) around the
motor-end flange, pull it with a tension gauge to the specified tension, and uniformly tighten the adjusting
bolts (hexagon socket-head bolts: M3 × 10, 4 pcs.).
(Use an Allen wrench of 2.5 mm across flats.)
Tightening torque of M3 bolt:
61.5 N·cm (6.27 kgf·cm)
Tension: 2.5 kgf
Adjusting bolt tightening torque:
162 N·cm (16.5 kgf·cm)
Caution: Do not apply a force to the encoder
by touching it directly.
 Loading...
Loading...






