7.7 Installations on moving elements (Mobile application)
7.7.1 Introduction
The sensors can be mounted on moving vehicles or moving machinery parts.
The characteristics of the detection field and the response time are the same as in stationary installations.
7.7.2 Speed limits
The detection is guaranteed only if the speed of the vehicle or part of the machinery is:
l
for detection distance less than or equal to 4 m (13.12 ft),from 0.1 m/s (0.33 ft/s) to 3 m/s (9.84 ft/s)
l
for detection distance greater than 4 m (13.12 ft), from 0.1 m/s (0.33 ft/s) to 2 m/s (6.56 ft/s)
Note: only the speed of the vehicle or of the part of machinery is considered. This is based on the assumption that
the person recognizes the hazard and stands still.
7.7.3 Detection signal generation conditions
When the sensor is mounted on moving parts, it will detect static objects as moving objects.
The sensor will trigger a detection signal if the following conditions are met:
l
The RCS (Radar Cross-Section) of static objects is greater than or equal to the RCS of a human body.
l
The relative speed between the objects and the sensor is greater than the minimum speed necessary for
detection.
7.7.4 Prevention of unexpected restart
As for stationary installations, when the moving part where the sensor is installed is arrested because of
detection, the system will switch to restart prevention safety function (if Safety working mode is not Always-on
access detection), and the sensor will detect the presence of a human body (see "Sensor positioning guidelines"
on page44). Static objects are then automatically filtered out and no longer detected.
The restart of the moving vehicle or moving part of the machinery in the presence of static objects can be
prevented using the following methods:
l
Static object detection option enabled (see "Restart prevention function: static object detection option" on
page44).
l
Anti-masking function: if the function is enabled, an error will occur when the static object will be close
enough to limit the detection of the sensor.
Note: if the anti-masking function is active when the sensor is moving also, this could generate false alarms
since the environment change during movement could be detected as tampering.
l
Manual restart: the restart is triggered externally and only once the static object is removed from the
trajectory of the moving vehicle or moving part.
l
Application logic on PLC/control unit that permanently stops the moving part if multiple stops occur
immediately after the restart of the part. If the vehicle or the part stops very quickly after the restart, this
probably means that there is a static obstacle. Once the moving part is stopped, the sensor does not detect
the object anymore and therefore the part moves but it stops again as soon as it detects the object again.
7.7.5 Recommendations for positioning the sensor
In mobile applications, the sensor moves with the vehicle or moving machinery parts. Position the sensor so the
floor is excluded from its detection field to avoid undesired alarms.
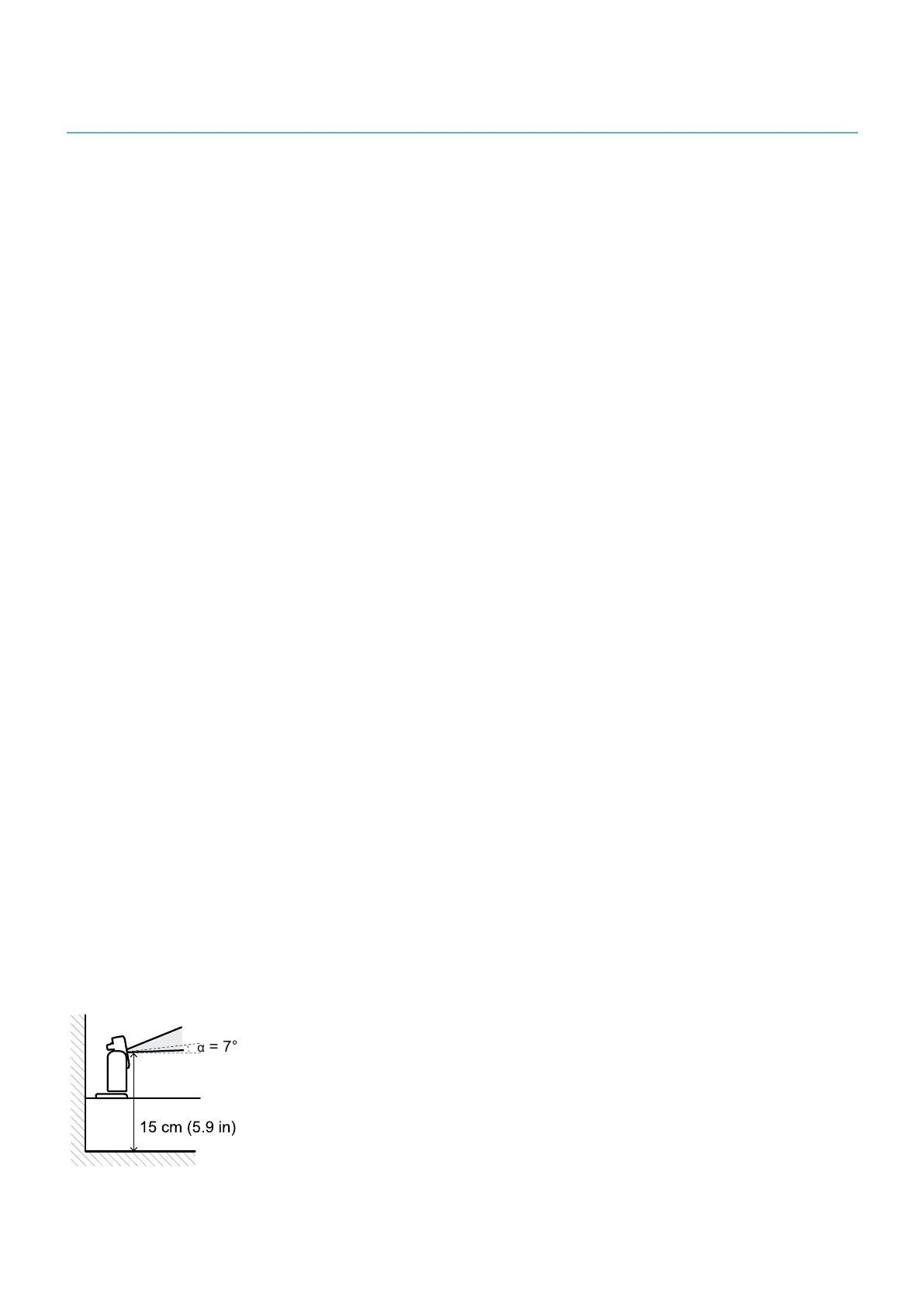
For driverless industrial trucks in indoor environments, it is recommended to use a S203A model sensor and
install it so that the center of the sensor is positioned at a height of 15 cm (5.9 in) from the ground, with an
inclination of no more than 7° upward.
7. Sensor position
Inxpect SRE 200 Series | Instruction manual v1.5 DEC 2023|Inxpect SAF-IM-200S_5m_7_00047_en_v1.5|© 2021-2023 Inxpect SpA
63