80
Inxpect SRE 200 Series| Instruction manual v1.5 DEC 2023 |Inxpect SAF-IM-200S_5m_7_00047_en_v1.5|© 2021-2023 Inxpect SpA
8. Installation and use procedures
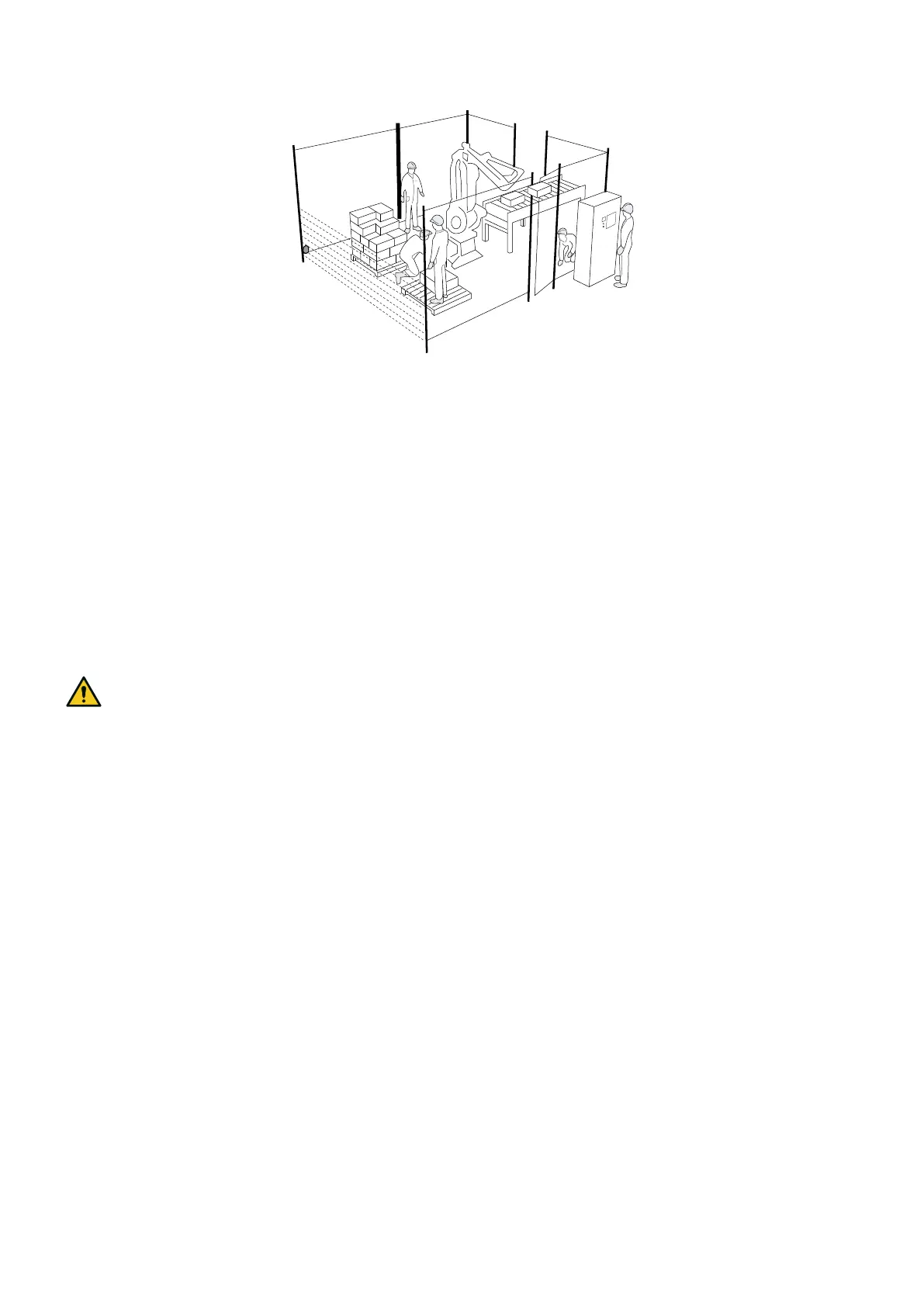
Position 1: position outside the dangerous area
Position 2: position hidden from the operator’s viewpoint at “Position 1”. Any other similar hidden position
should be tested.
Position 3: position at the center distance between two sensors and/or close to the boundaries of the dangerous
area (e.g., along safety fences). This position is suggested to verify that the detection fields of different sensors
overlap without leaving uncovered areas. Standing close to the fences also allows for verifying that the sensors
are rotated correctly, covering both the right and the left side.
Position 4: possible hidden position by elements in the environment that are present or not present during the
validation process. Examples: Obstacle 2 precludes detection by Sensor 1 (S1). Obstacle 3 is partially present
during the Validation process but will likely be present during the normal operating cycle and will preclude the
detection of Sensor 4 (S4). This position must be covered by additional Sensor 5 (S5) and Sensor 6 (S6) that
should be added within a proper feasibility study.
Position 5: any raised and walkable position indicated by the risk assessor.
Other positions can be indicated by the risk assessor or the machine manufacturer.
8.5.4 Validate the system with Inxpect Safety
WARNING! When the validation function is active, the system response time is not guaranteed.
The Inxpect Safety application is helpful during the safety functions validation phase and allows the actual field
of view of the sensors to be checked based on their installation position.
1. Click Validation: the validation starts automatically.
2. Move in the monitored area as indicated in "Validation test" on the previous page and "Validation
procedure for the restart prevention function" on page78.
3. Check that the sensor behaves as expected.
Note: if the static object detection option is enabled, the empty dot represents a moving target, and the
full dot represents a static target.
4. Check that the distance and the angle where the motion is detected are the expected values.