Operating mode
Sensorless torque control with speed limitation
10
Function library
10.3
10.3.3
L
10.3-13
EDS82EV903-1.0-11/2002
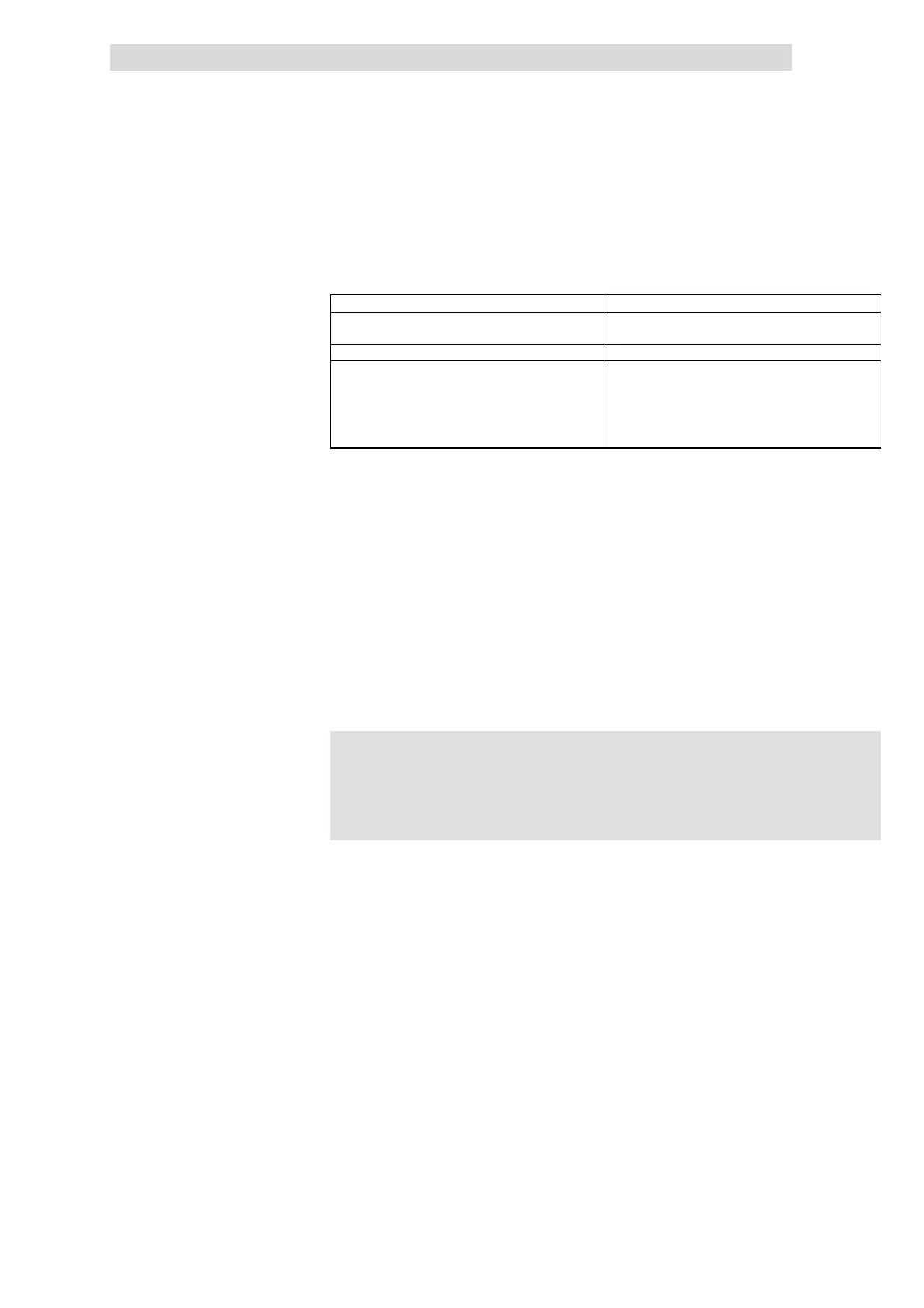
In general, the sensorless torque control is ready for operation after the motor
parameters have been identified. The drive performance can be optimised by
manually setting several parameters: 44
Drive performance Remedy
Torque is not constant Reduce motor inductance (C0092) by approx. 10 ... 20 %.
Idle current and maximum current decrease.
Drive does not accelerate from standstill Raise the torque setpoint to 20 ... 25 %.
Controller is not able to follow the quick load changes A dapt gain C0077) and adjustment time (C0078) of the
I
max
-controller:
• Reduction o f C0078 = I
max
controller becomes quicker
(more dynamic)
• Increase of C0078 = I
max
controller becomes slower
(”smoother”)
l The minimum torque setpoint must not fall below 10 % (setting range 1 :
10).
l The motor may stall at operation with output frequencies < 3 Hz. If so, reset
the internal control by quickly switching the controller inhibit.
l If C0412/6 is combined with an analog signal source it is possible to display
the torque setpoint under C0047.
l If C0412/6 is not combined with an analog signal source (FIXED-FREE) it is
possible to select the torque setpoint under C0047. Please note:
– When disconnecting the mains, the value set will be lost!
– Before releasing the controller it is absolutely necessary at the restart to
select the correct setpoint under C0047. Otherwise the drive would start
with the maximum torque.
)
))
) Note!
In the control modes ”V/f characteristic control” and ”vector
control” the signal combined with C0412/6 or C0047 act as a
torque limitation.
Optimising the sensorless
torque control
Tip