Dancer position control (linear drive)
15
Application examples
15.4
L
15.4-2
EDS82EV903-1.0-11/2002
Set C0070, C0071, C0072 in a way that if the dancer changes its actual position,
its original position can be reached quickly and without excessive overshooting.
1. X3/E4 = HIGH (process controller stop), C0072 = 0 (no influence).
2. Set C0070.
3. X3/E4 = LOW, C0072 = 0 (no influence).
4. Set C0071.
5. Set C0072.
JOG1/3
QSP
PCTRL1-OFF
CINH
V
1
V
2
F
G
S
E
A
R1
+5 V
0 ...+10 V
W
2
U
2
V
2
U
PE
1
V
1
W
1
2
4
PE
L1
F1
K1
L2
L3
1
2
T
2
T
1
A2A1 7 7
A4
59 20 28 E1
E2
E3 E4
E5 E6
1U 1I
2U
2I
62
63 9
Application-I/O
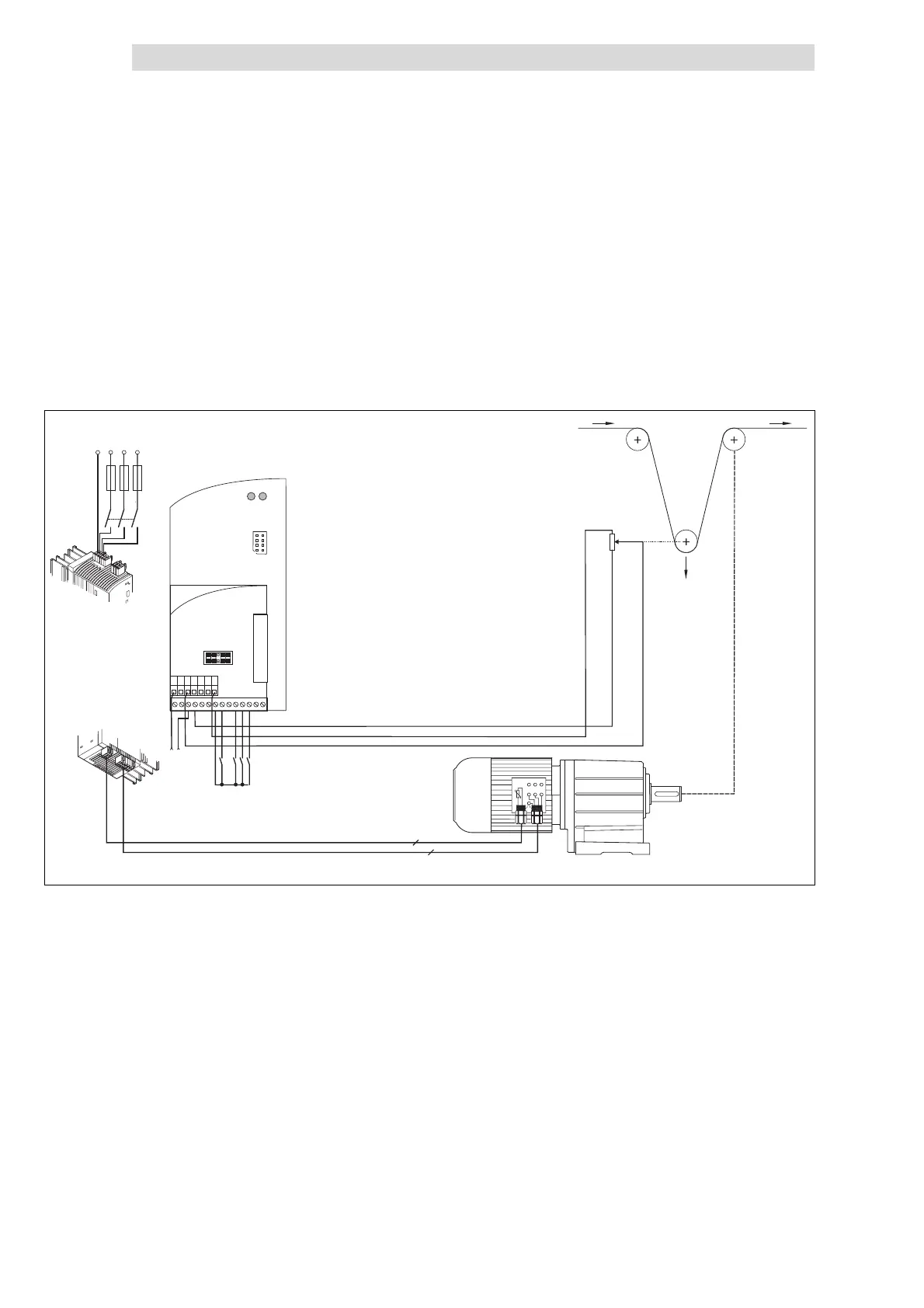
Fig. 15.4-1 Principle wiring of a dancer position control
Mains contactor
Main setpoint ~V1
Dancer potentiometer
Adjustment