5 - 6
5 START-UP PROCEDURES
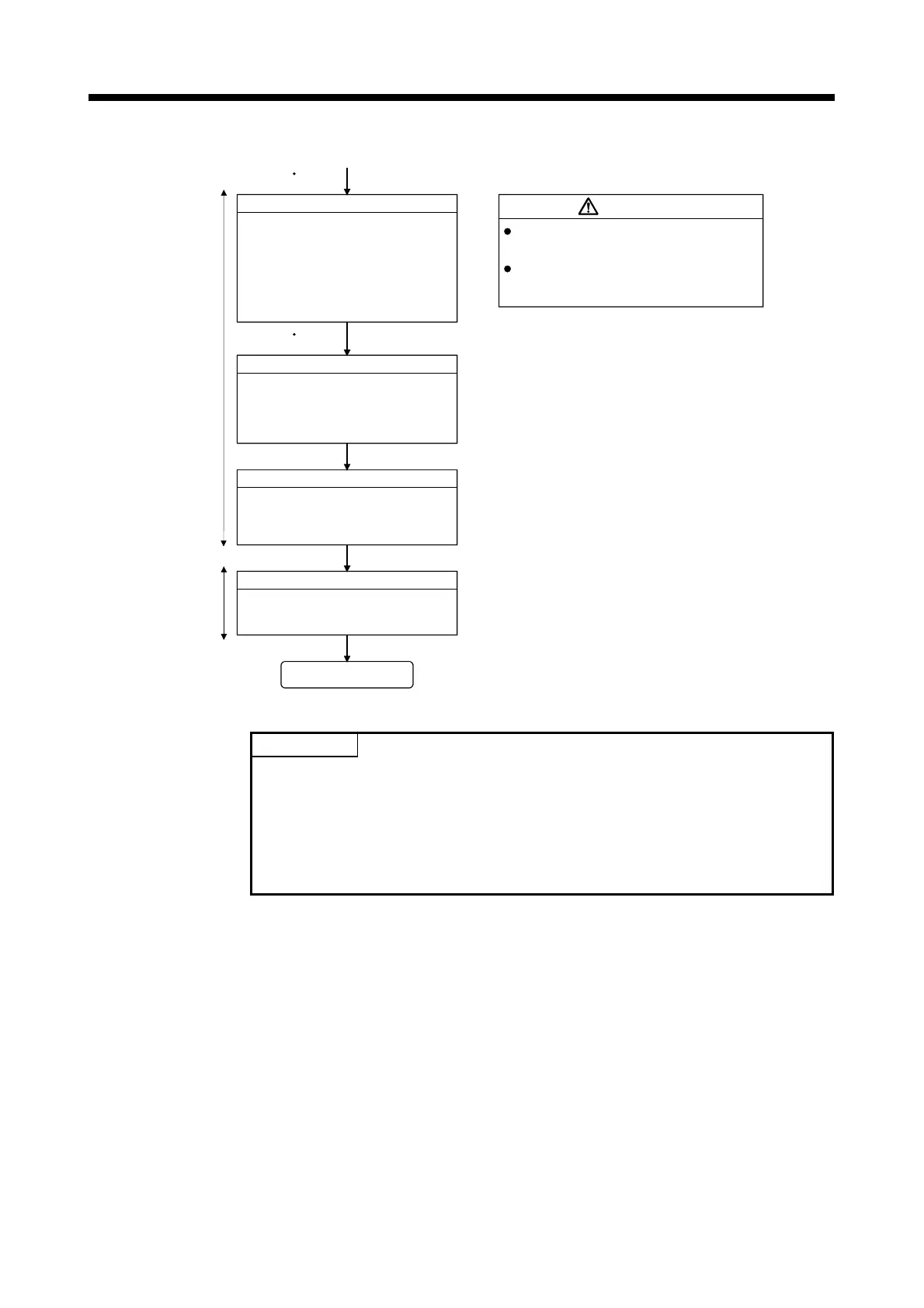
Set the RUN/STOP/RESET switch of Motion
controller to RUN, and check that all
positioning controls by Motion programs are
correct.
3)
[Test mode
JOG operation ]
Motion CPU
area
Check machine operation
Check the following by making the machine
operate with the JOG operation of
MT Developer2.
(1) Machine operates correctly
(no vibration, hunting, etc. )
(2) Stroke limits operate correctly
(3) Machine stops by the emergency stop
or forced stop.
[Test mode
home position return ]
Check the following by executing the home
position return.
(1) Home position return direction
(2) Home position return data
(3) Proximity dog position
Check home position return
Check Motion program
[Programming]
Check the sequence operation by executing
the PLC program using an actual external
input.
Check by automatic operation
[Monitor]
PLC CPU
area
END
The system must have a mechanical allowance so
that the machine itself can stop even if the stroke
limits switch is passed through at the max. speed.
Execute the test operation in the system that it is
low-speed as much as possible and put forced
stop, and confirm the operation and safety.
CAUTION
POINTS
(1) Make note of servo motor module names before the servo motor is mounted
on a machine. The servo motor rating plate may not be visible after the servo
motor is mounted.
(2) When the servo amplifier, servo motor is first turned on, check the operation
before the servo motor is mounted on a machine to avoid an unexpected
accidents such as machine breakage.
 Loading...
Loading...





