4Basic operations
Jog operation 4-51
4.5 Jog operation
Refer to the separate manual "Robot arm setup and maintenance" when carrying out jog operation.
The following jog operation modes are available. Use these according to the purpose.
Table 4-1 : Jog modes
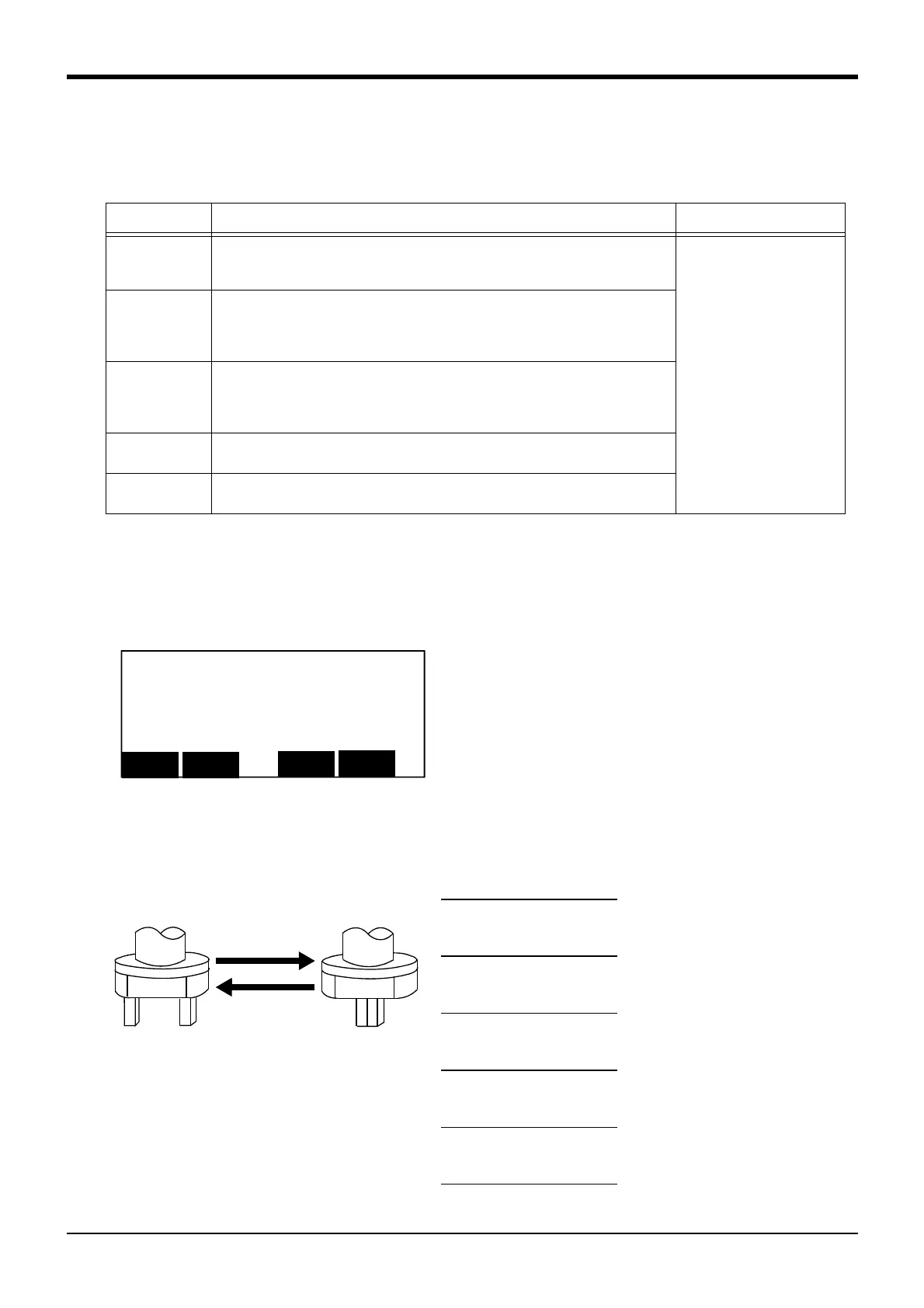
4.6 Opening and closing the hand
Hands 1 to 6 can be opened and closed with the T/B.
Press the [HAND] key, and display the hand screen.
Opening and closing hand 1
Open: Press [+C ] key
Close: Press [-C ] key
Opening and closing hand 2
Open: Press [+B ] key
Close: Press [-B ] key
Opening and closing hand 3
Open: Press [+A ] key
Close: Press [-A ] key
Opening and closing hand 4
Open: Press [+Z ] key
Close: Press [-Z ] key
Opening and closing hand 5
Open: Press [+Y ] key
Close: Press [-Y ] key
Opening and closing hand 6
Open: Press [+X ] key
Close: Press [-X ] key
Jog mode Main application Explanation
JOINT JOG ・ Moves each joint.
・ Moves the robot arm largely.
・ Changes the robot posture.
Separate manual "Robot arm
setup and maintenance"
XYZ JOG ・ Accurately sets the teaching position.
・ Moves the axis straight along the XYZ coordinate system.
・ Moves the axis straight while maintaining the robot posture.
・ Changes the posture while maintaining the hand position.
TOOL JOG ・ Accurately sets the teaching position.
・ Moves the axis straight along the hand direction.
・ Changes the posture while maintaining the hand position.
・ Rotates the hand while maintaining the hand position.
3-AXIS XYZ JOG ・ When the axis cannot be moved with XYZ JOG that maintains the posture.
・ When the tip is to be moved linearly but the posture is to be changed.
CYLINDER JOG ・ Moves in a cylindrical shape centering on the Z axis while maintaining the posture.
・ Moves linearly in a radial shape centering on the Z axis while maintaining the posture.
<HAND> ±C : HAND1 ±Z : HAND4
±B : HAND2 ±Y : HAND5
±A : HAND3 ±X : HAND6
76543210 76543210
OUT-900□□□□□□ IN-900□□□□□□
CLOSE
HND
ALIGN
SAFE
 Loading...
Loading...






