Position variable name ・・・・ Designate a random character string starting with "P".
Up to eight characters can be designated.
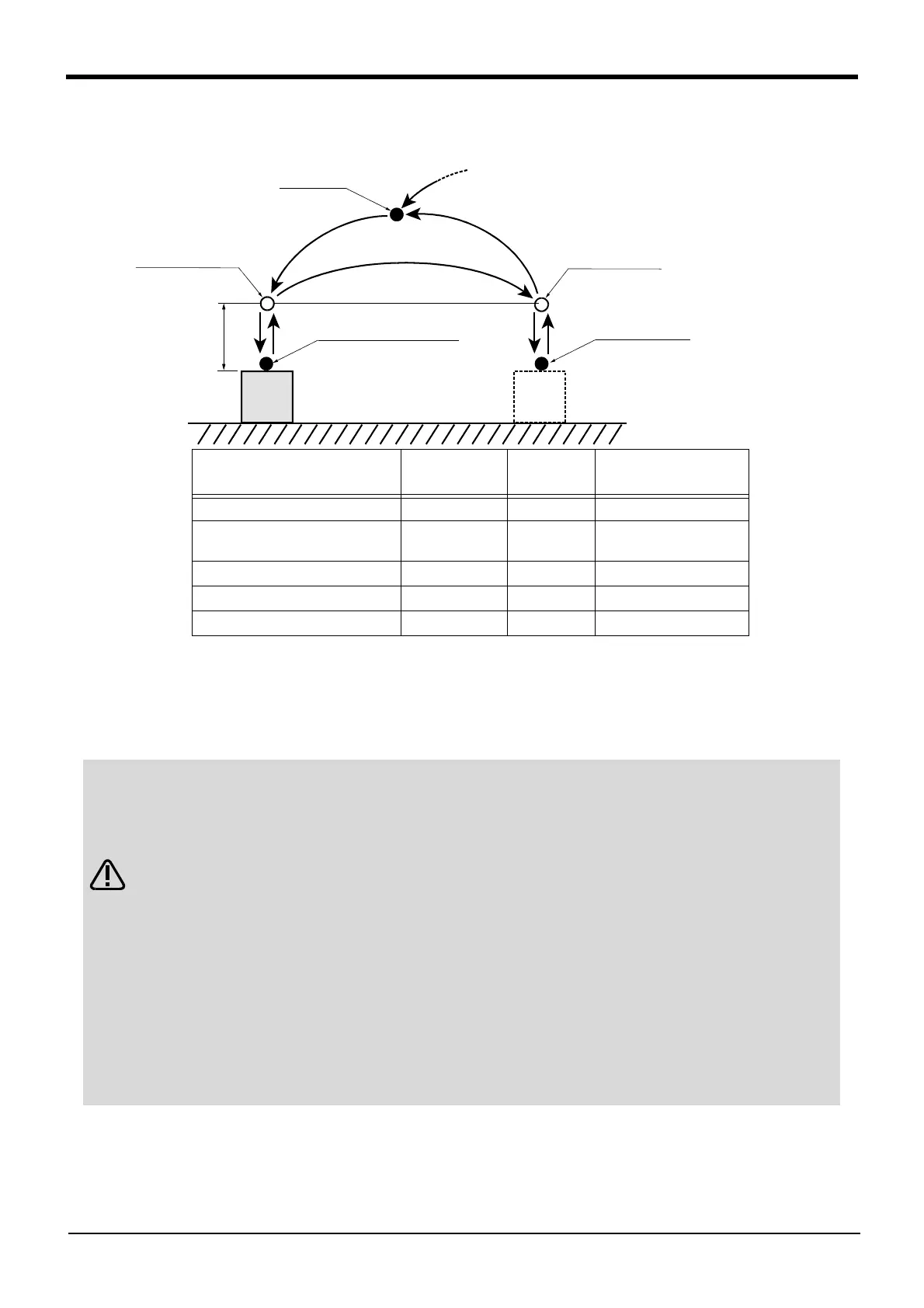
Name
Position variable
name
Teaching Remarks
Wait position PWAIT Required
Upward position to grasping
workpiece
- Not required Designate with commands.
Position to grasp workpiece PGET Required
Upward position to release workpiece - Not required Designate with commands.
Position to release workpiece PPUT Required
◇◆◇ Teaching the operation position ◇◆◇
The operation position does not necessarily need to be taught.
The positions shown with white circles in Fig. 4-9 can be designated with commands as "position 20mm away
from target position". Refer to Page 55, "(3)Describing and creating the program".
The designation of the direction separated from the target position differs according to the
robot type.
The position is along the Z axis of the TOOL coordinate system, and the direction is
designated with the + and - signs.
Refer to the section on the TOOL JOG operation in the separate "Instruction Manual/
Robot arm setup and maintenance", and confirm the Z axis direction of the TOOL
coordinate system. Then, designate the correct sign (direction) that matches the robot
being used.
Designating the reverse direction could lead to interference with the peripheral devices and
damage.
Generally (in the default state), the hand retract direction is the "-" sign with the vertical
articulate type robot, and the "+" sign is the robot's upward direction with the other robots
 Loading...
Loading...






