3 - 2 3 - 2
MELSEC-Q
3 SPECIFICATIONS AND FUNCTIONS
3.2 List of functions
The following table lists the functions of the QD70.
(Read "SECTION 2 CONTROL DETAILS AND SETTING" for details of the functions.)
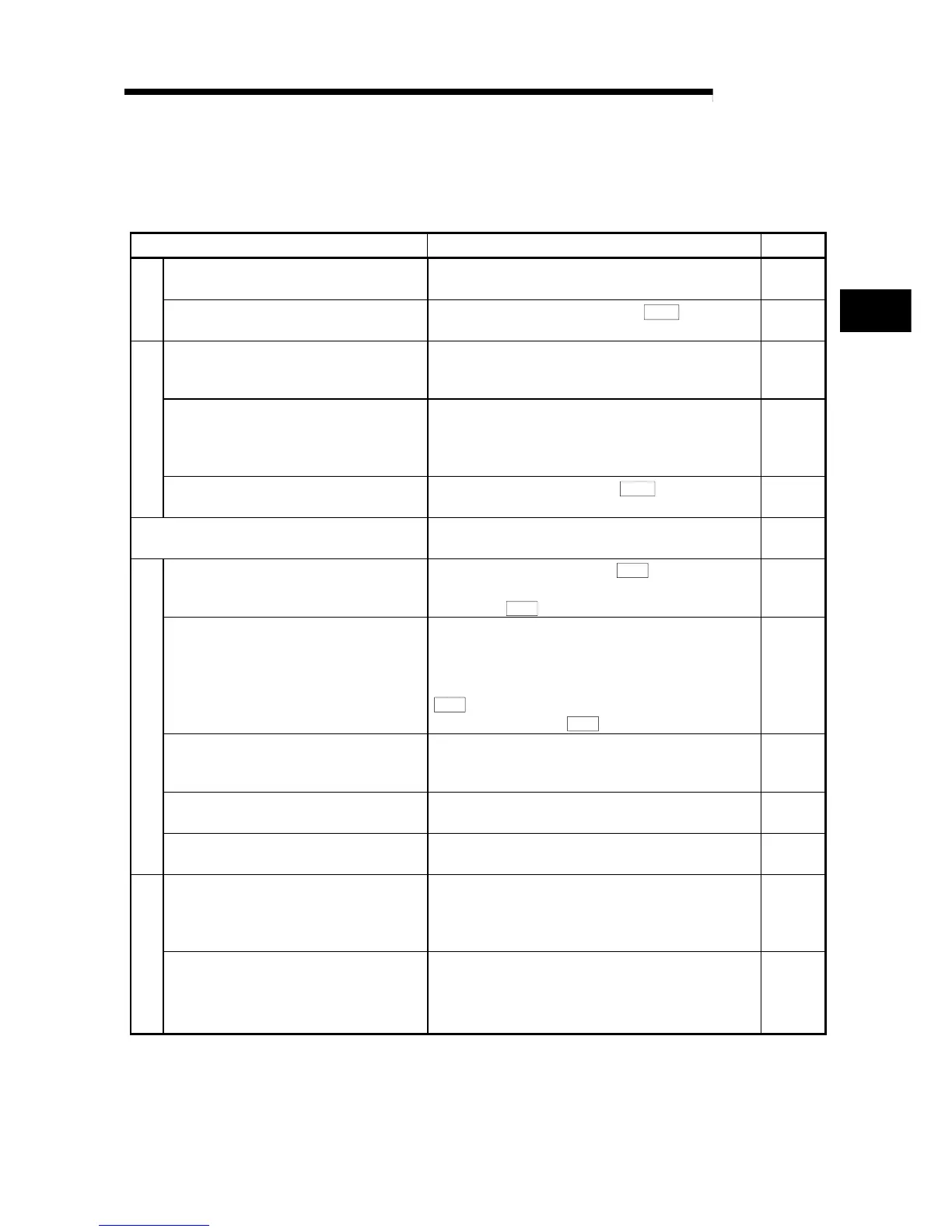
Function name Description Reference
Machine OPR control
Mechanically establishes the positioning control start
point using a near-point dog or stopper.
Section
8.2
OPR control
Fast OPR control
Positions a target to the OP address (
Md. 1
Current feed
value) stored in the QD70 using machine OPR control.
Section
8.3
Position control (1-axis linear control)
Positions a target using a linear path to the address set in
the positioning data or to the position designated with the
movement amount.
Section
9.2.2
Speed-position switching control
First, carries out speed control, and then carries out
position control (positioning control with designated
address or movement amount) by turning the "speed-
position switching signal" ON.
Section
9.2.3
Positioning control
Current value changing
Changes the Current feed value (
Md. 1
) to the address
set in the positioning data.
Section
9.2.4
JOG operation
Outputs a pulse to drive unit while the JOG start signal is
ON.
Chapter
10
Speed limit function
If the command speed exceeds "
Pr. 5
Speed limit value"
during control, this function limits the commanded speed
to within the "
Pr. 5
Speed limit value" setting range.
Section
11.2
Speed change function
This function changes the speed at any point during
speed control of speed-position switching control or
during JOG operation.
Set the new speed in the speed change buffer memory
(
Pr. 7
New speed value), and change the speed with the
Speed change request (
Pr. 6
).
Section
11.3
Software stroke limit function
If a command outside of the upper/lower limit stroke limit
setting range, set in the parameters, is issued, this
function will not execute positioning for that command.
Section
11.4
Acceleration/deceleration processing function
This function adjusts the acceleration/deceleration
processing of control.
Section
11.5
Sub function
Restart function
This function resumes positioning control during a stop of
the axis from where it had stopped.
Section
11.6
External I/O signal logic switching function
This function changes the external I/O signal logic to
match the externally connected device.
It can be changed by making the intelligent function
module switch setting.
Section
12.2
Common function
External I/O signal monitor function
This function monitors the external I/O signal states using
GX Developer.
Section
5.5
Section
12.3
3
 Loading...
Loading...