4 - 1 4 - 1
MELSEC-Q
4 DATA USED FOR POSITIONING CONTROL
CHAPTER 4 DATA USED FOR POSITIONING CONTROL
This chapter explains the specifications of the data to be set to the QD70.
4.1 Type of data
4.1.1 Parameters and data required for control
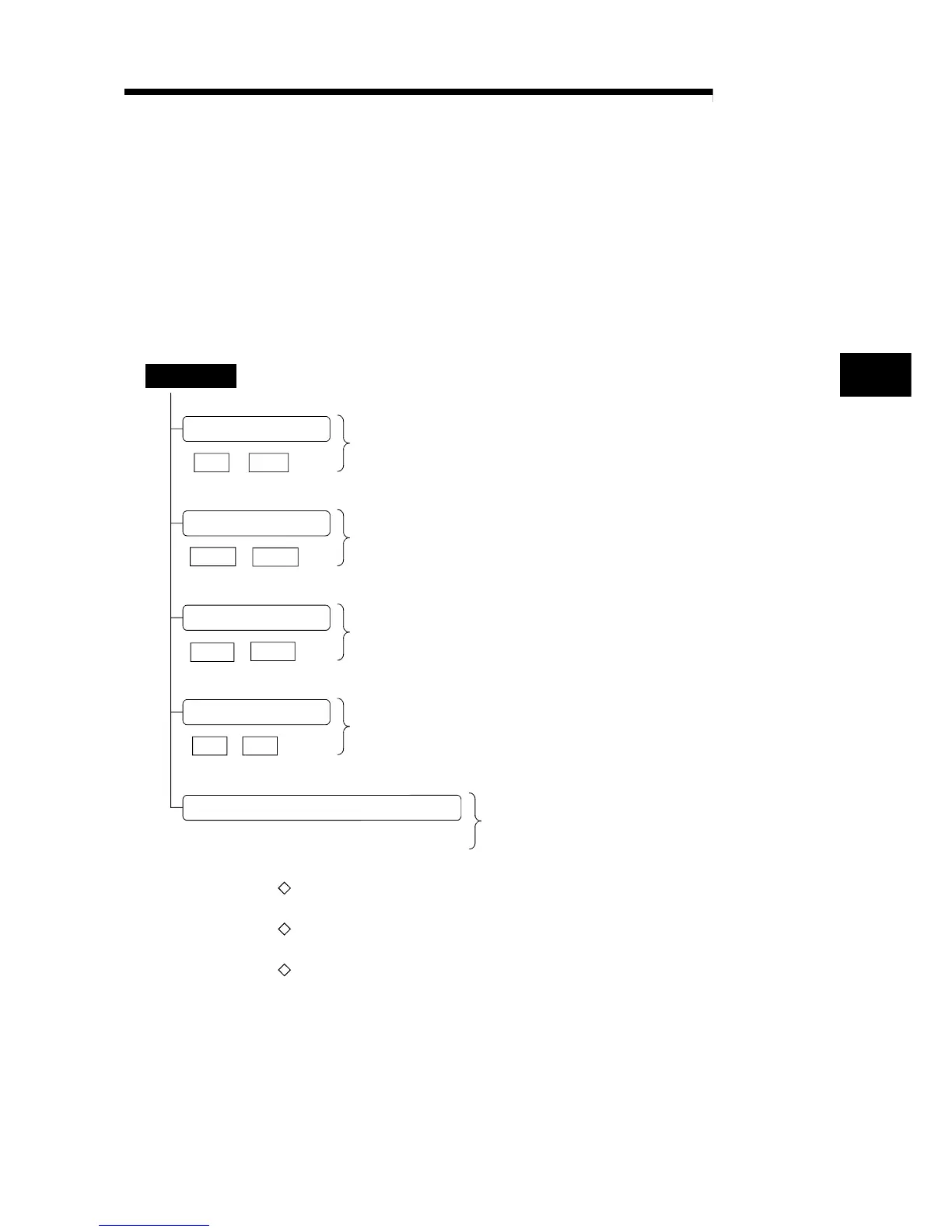
The parameters and data required to carry out control with the QD70 include the
"setting data", "monitor data" and "control data" shown below.
Setting data
( Pr. 1 to Pr. 10 )
Parameters
OPR data
( OPR. 1 to OPR. 9 )
JOG data
( JOG. 1 to JOG. 4 )
( Da. 1 to Da. 7 )
Positioning data
(Switches 1 to 5)
Set at a system startup according to the machinery, equipment and applications.
(Storage destination: QD70 buffer memory)
Set values required to exercise "OPR control".
(Storage destination: QD70 buffer memory)
Set values required to perform "JOG operation".
(Storage destination: QD70 buffer memory)
Set values required to exercise "positioning control".
(Storage destination: QD70 buffer memory)
Set the pulse output mode and external I/O signal logic.
(Storage destination: "I/O assignment setting" PLC
parameter of QCPU)
Intelligent function module switches
The parameters and OPR data are made valid when the PLC READY signal [Y0]
turns from OFF to ON.
The JOG data or positioning data are made valid when a JOG operation start or
positioning control start is made.
Use GX Developer to set the intelligent function module switches. (For details, refer
to "Section 5.6 Switch setting for intelligent function module".)
4
 Loading...
Loading...