4 - 14 4 - 14
MELSEC-Q
4 DATA USED FOR POSITIONING CONTROL
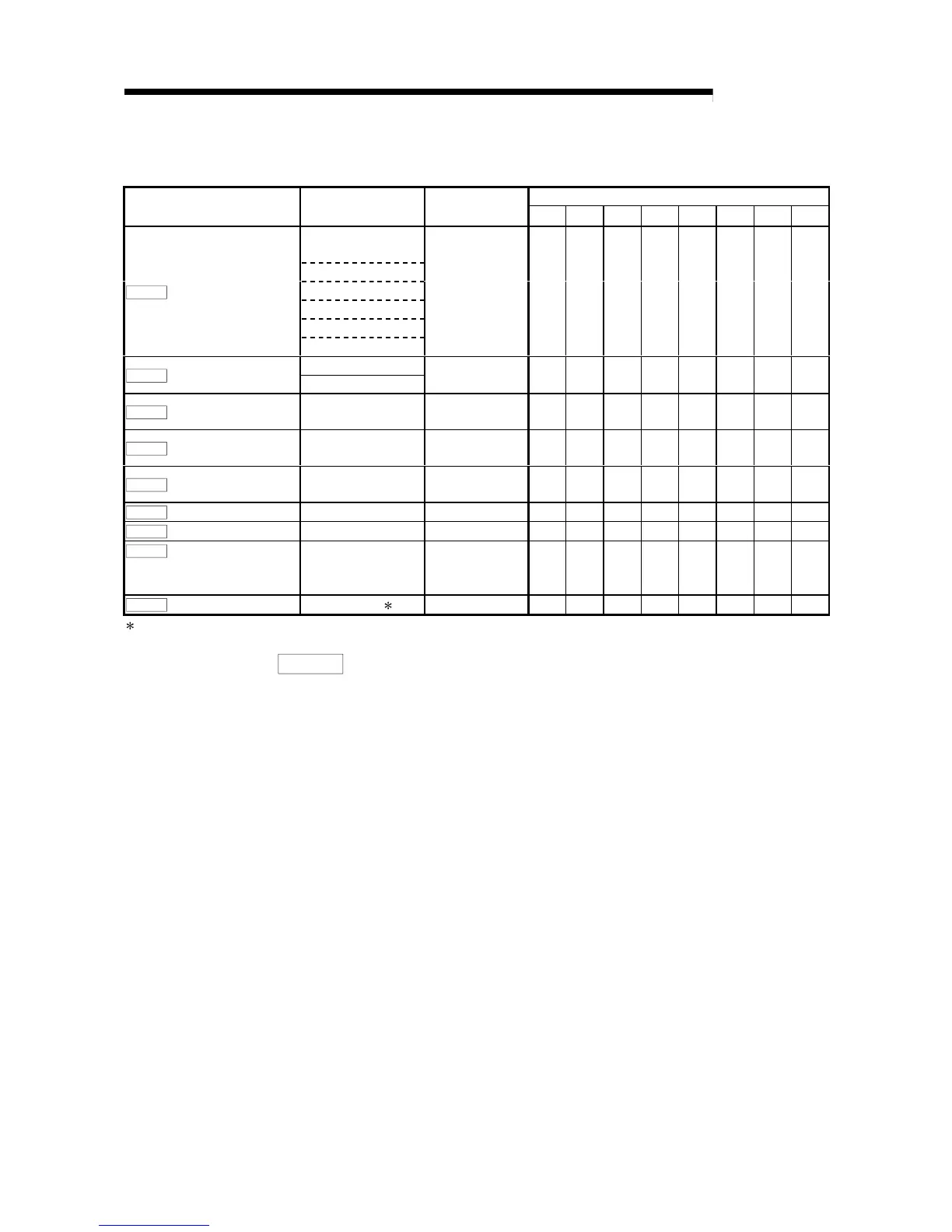
4.3 List of OPR data
Setting value buffer memory address
Item
Setting value, setting
range
Default value
Axis 1Axis 2Axis 3Axis 4Axis 5Axis 6Axis 7Axis 8
0: Near-point dog
method
1: Stopper 1
2: Stopper 2
3: Stopper 3
4: Count 1
OPR. 1
OPR method
5: Count 2
0 20 120 220 320 420 520 620 720
0: Forward direction
OPR. 2
OPR direction
1: Reverse direction
0 21 121 221 321 421 521 621 721
OPR. 3
OP address
-2147483648 to
2147483647 (pulse)
0
22
23
122
123
222
223
322
323
422
423
522
523
622
623
722
723
OPR. 4
OPR speed 1 to 200000 (pulse/s) 1
24
25
124
125
224
225
324
325
424
425
524
525
624
625
724
725
OPR. 5
Creep speed 1 to 200000 (pulse/s) 1
26
27
126
127
226
227
326
327
426
427
526
527
626
627
726
727
OPR. 6
ACC/DEC time at OPR
0 to 32767 (ms) 1000 28 128 228 328 428 528 628 728
OPR. 7
DEC/STOP time at OPR
0 to 32767 (ms) 1000 29 129 229 329 429 529 629 729
OPR. 8
Setting for the movement
amount after near-point
dog ON
0 to 2147483647
(pulse)
0
30
31
130
131
230
231
330
331
430
431
530
531
630
631
730
731
OPR. 9
OPR dwell time
0 to 65535 (ms)
0 32 132 232 332 432 532 632 732
: When making setting in a sequence program, set 0 to 32767 in decimal as-is, and 32768 to 65535 in hexadecimal.
OPR. 1
OPR method
Set the "OPR method" for carrying out machine OPR control.
0 : Near-point dog method....After decelerating at the near-point dog ON, stop at
the zero signal and complete the OPR control.
1 : Stopper 1..........................After decelerating at the near-point dog ON, stop
with the stopper, and complete the OPR control
after the OPR dwell time has passed.
2 : Stopper 2..........................After decelerating at the near-point dog ON, stop
with the stopper, and complete the OPR control with
the zero signal.
3 : Stopper 3..........................After starting with the creep speed, stop with the
stopper, and complete the OPR control with the
zero signal.
4 : Count 1.............................After decelerating at the near-point dog ON, move
the designated distance, and complete the OPR
control with the zero signal.
5 : Count 2.............................After decelerating at the near-point dog ON, move
the designated distance, and complete the OPR
control.
Note) Refer to "8.2.2 Machine OPR method" for details on the OPR methods.
 Loading...
Loading...